所有
全文检索
高级检索
首页
编委会
关于本刊
期刊简介
主编
期刊订阅
联系我们
投稿指南
本刊稿约
本刊规范
著作权协议
稿件出版流程
同行评议流程
作者费用
网络首发
伦理规则
期刊原则
出版伦理
学术不端认定
在线期刊
当期目录
优先发表
最新录用
过刊浏览
更正声明
English
所有
标题
作者
关键词
摘要
DOI
栏目
地址
基金
中图分类号
PACS
EEACC
首页
编委会
关于本刊
期刊简介
主编
期刊订阅
联系我们
投稿指南
本刊稿约
本刊规范
著作权协议
稿件出版流程
同行评议流程
作者费用
网络首发
伦理规则
期刊原则
出版伦理
学术不端认定
在线期刊
当期目录
优先发表
最新录用
过刊浏览
更正声明
English
下载:
全尺寸图片
幻灯片
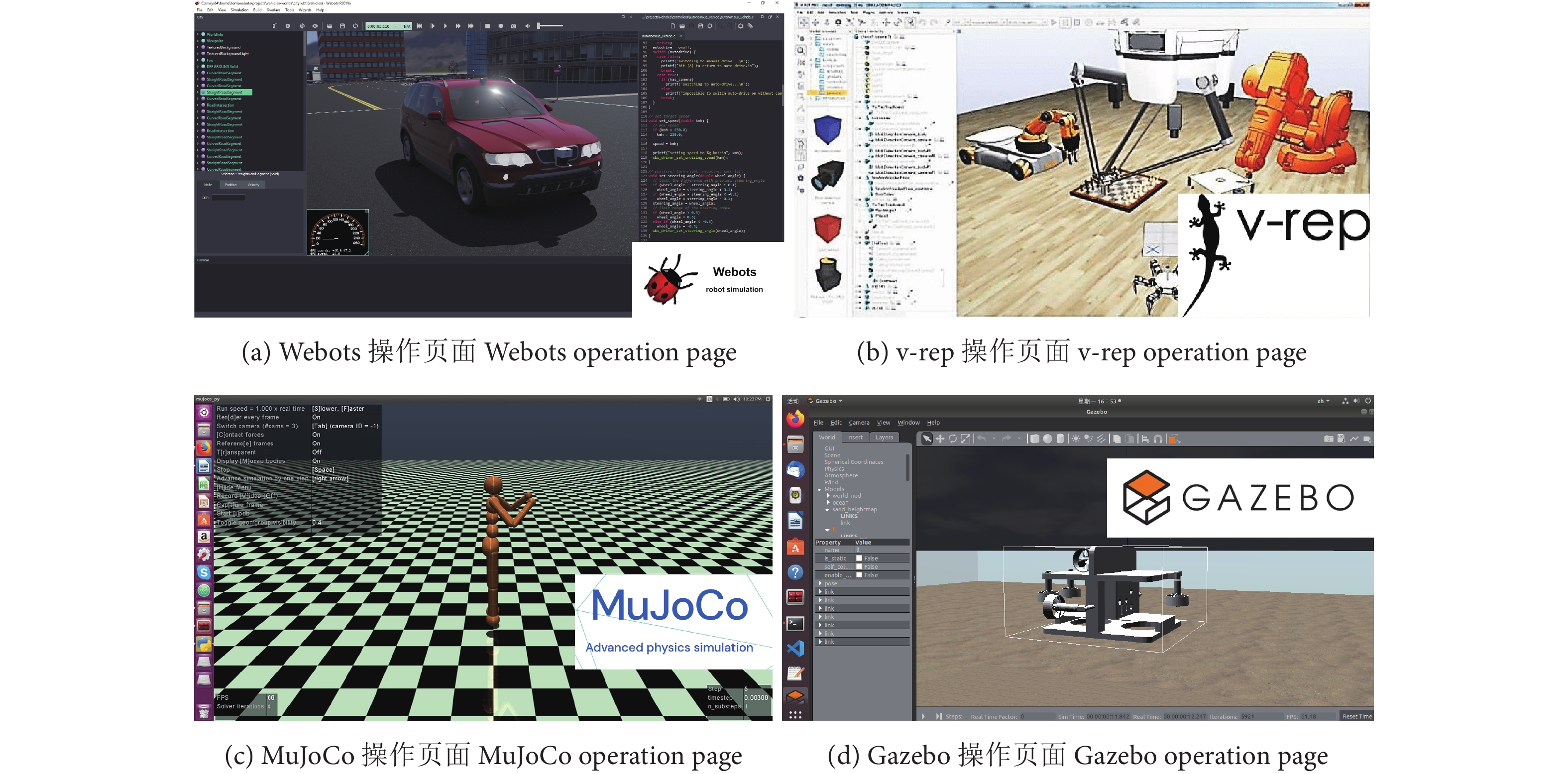
各软件操作页面
2024, 20(1): 1-10.
基于Gazebo的深海网箱洗网机器人动力学仿真平台搭建 .
本文全文图片
各软件操作页面
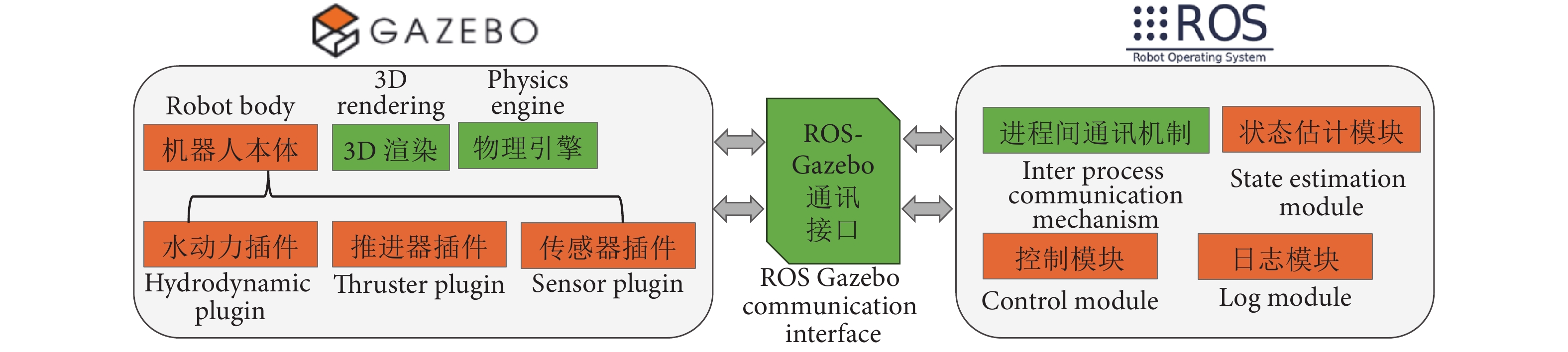
仿真系统架构
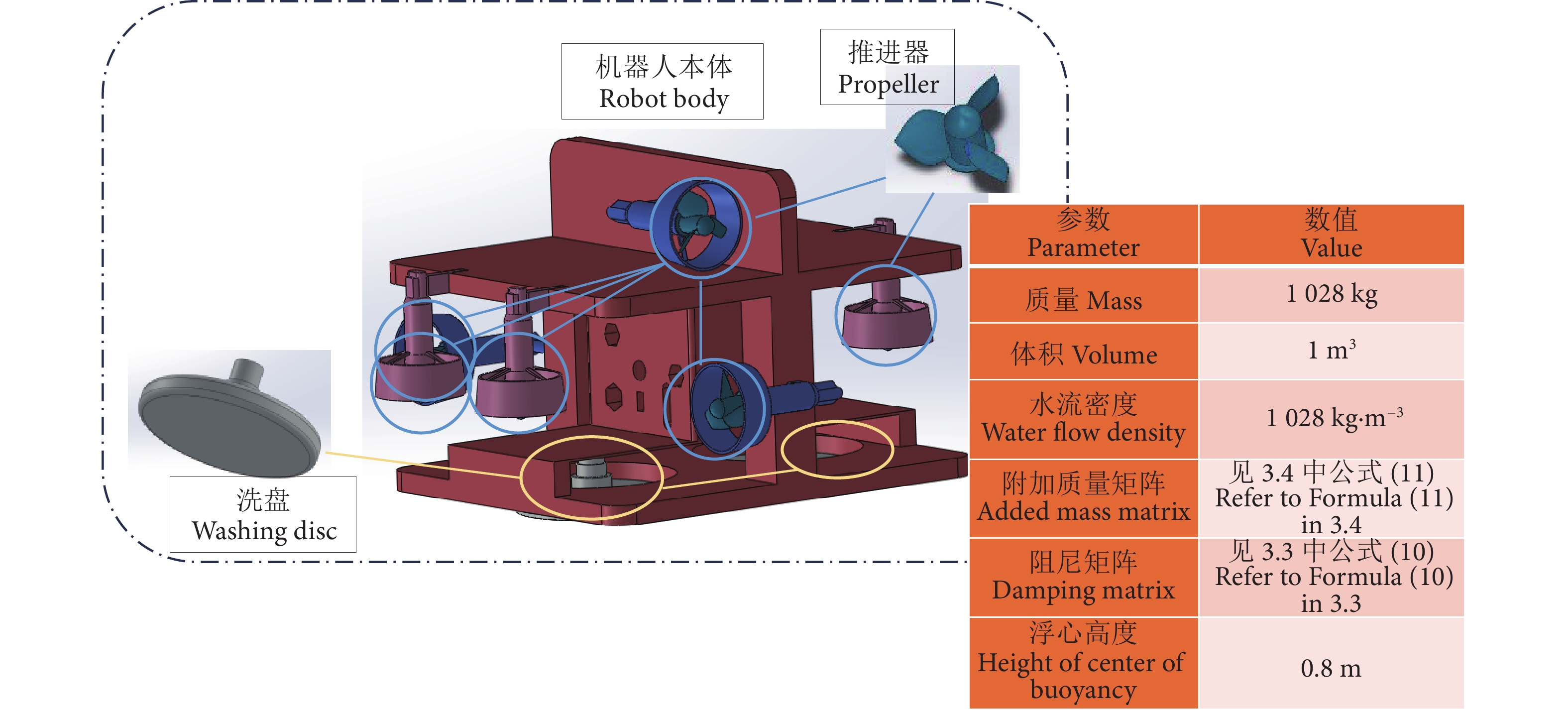
洗网机器人本体结构图
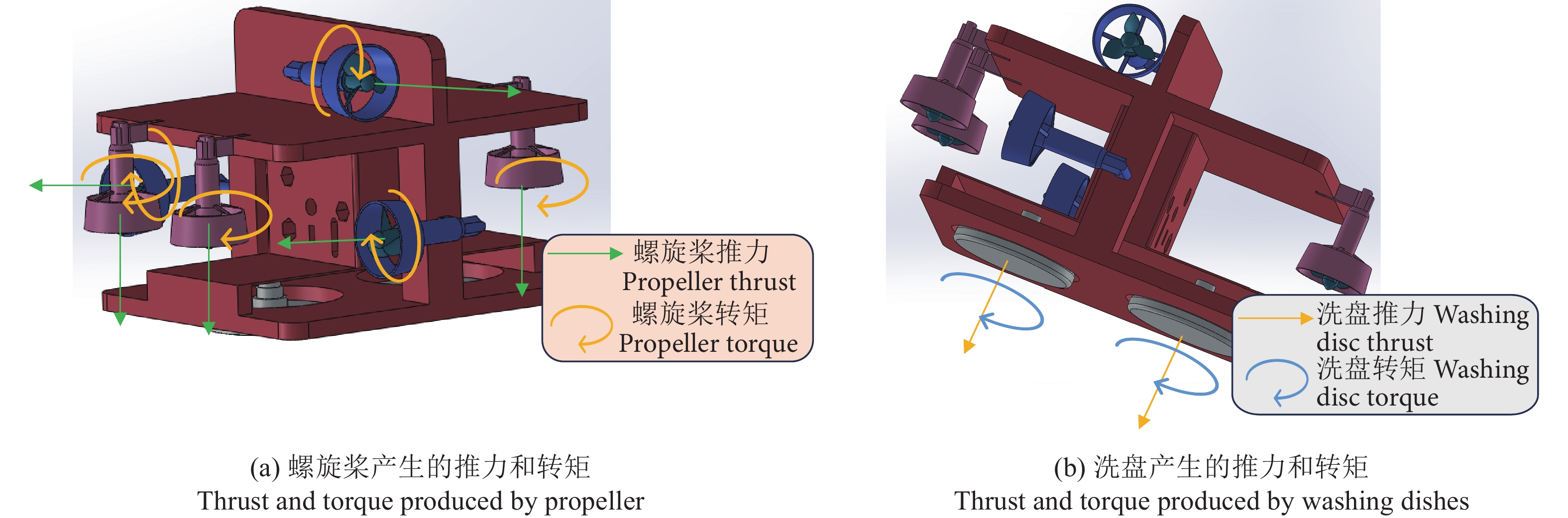
螺旋桨洗盘对机器人施加的推力和转矩
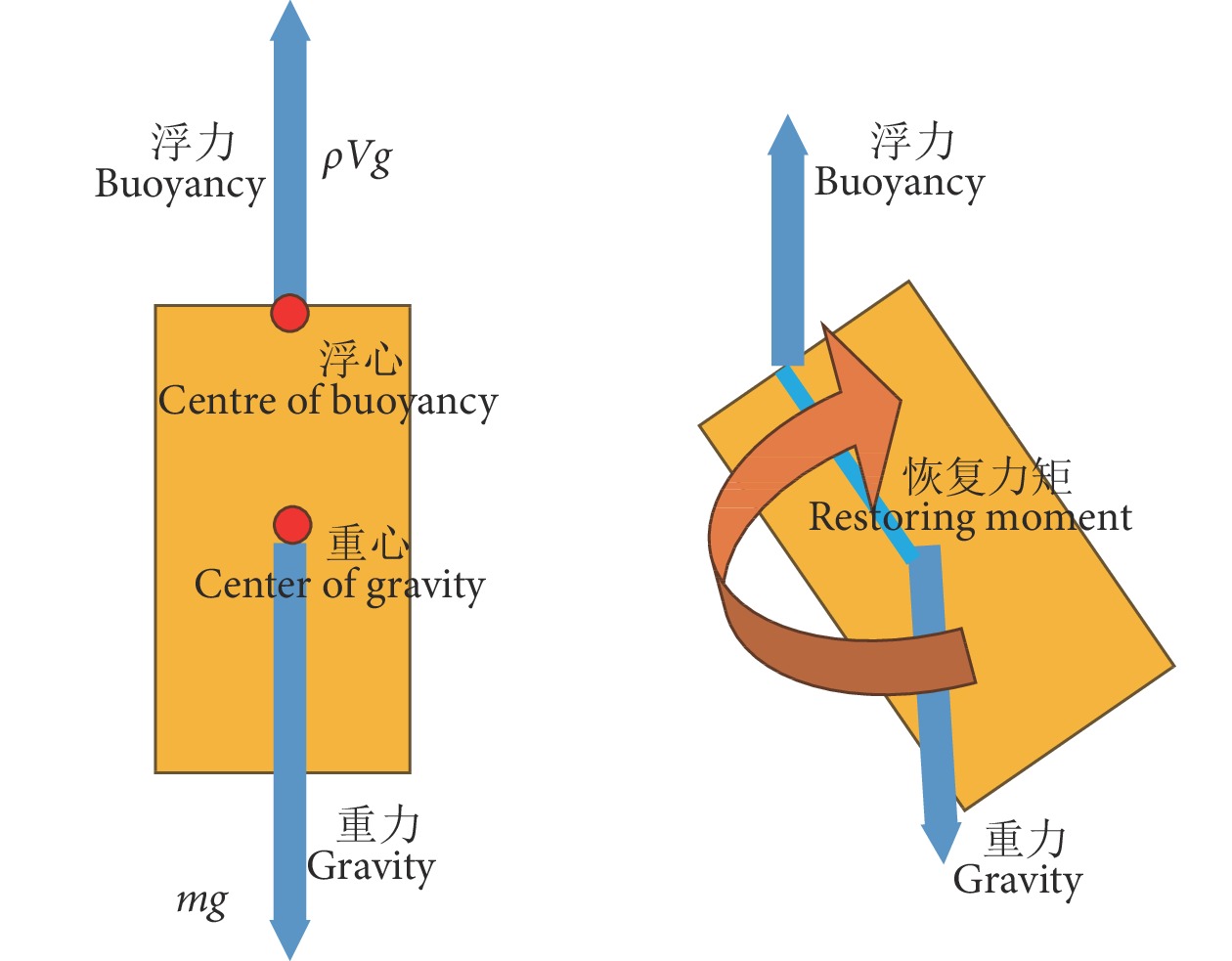
重力、浮力共同作用示意图
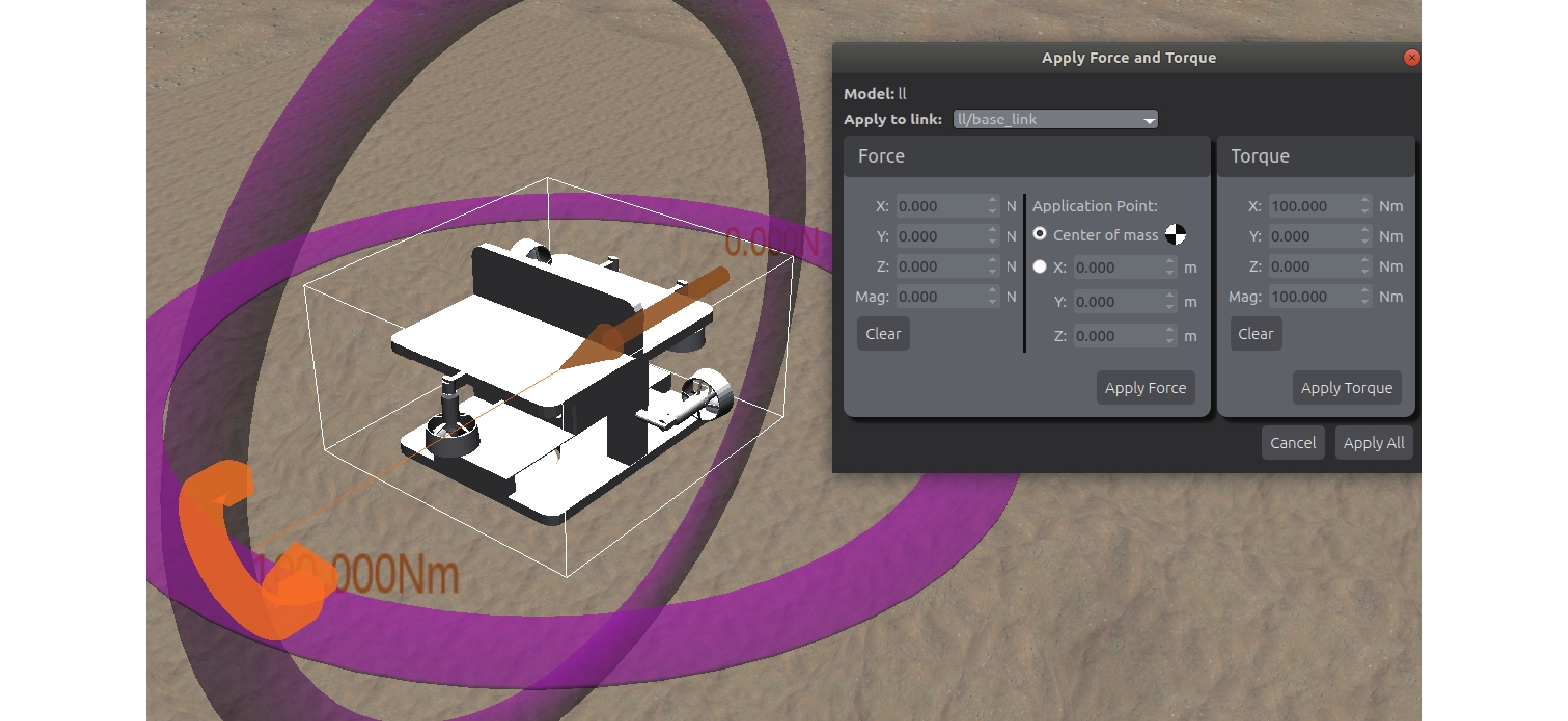
Gazebo中对机器人施加转矩 (以
x
轴为例)
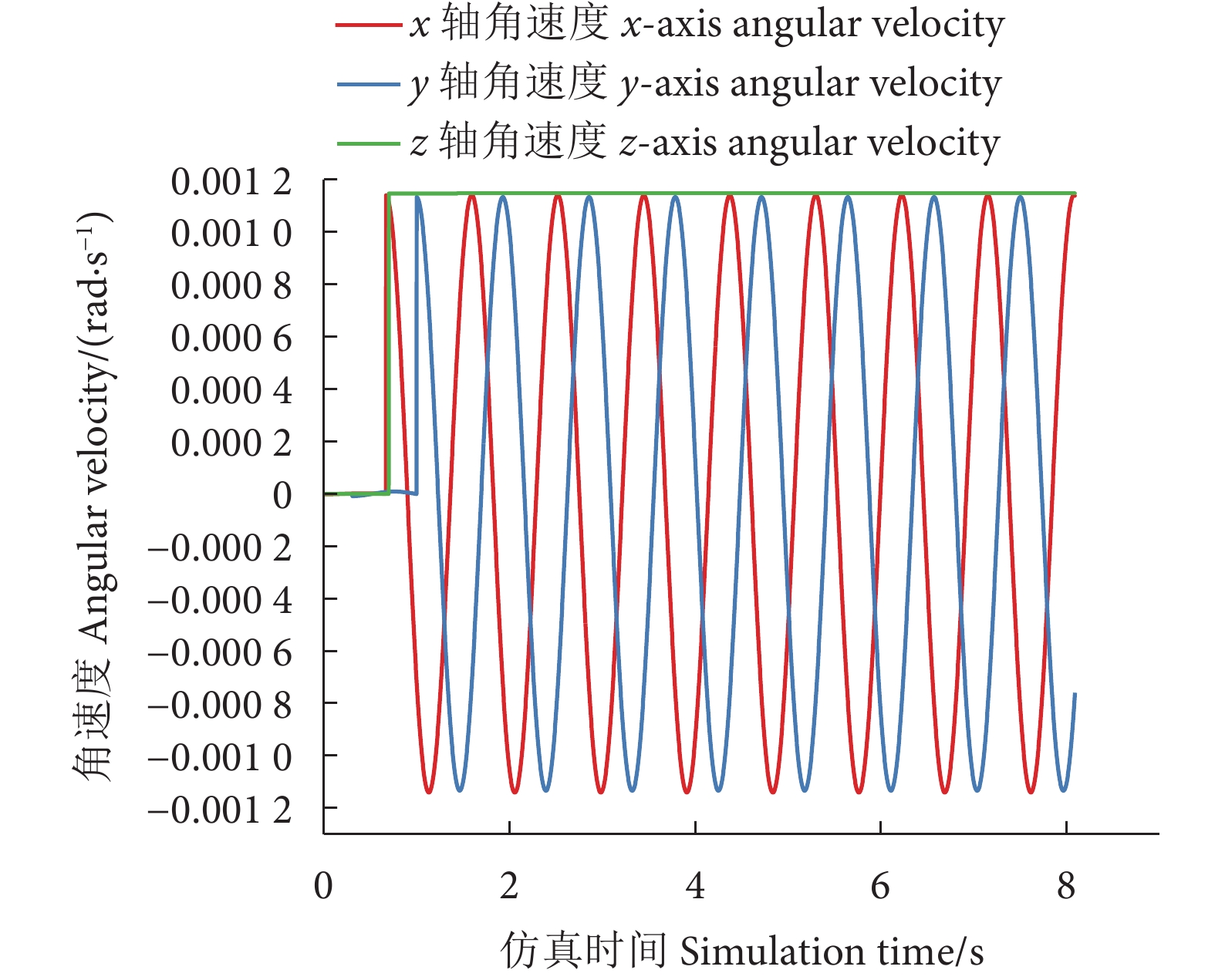
重力、浮力作用下的角速度冲击响应
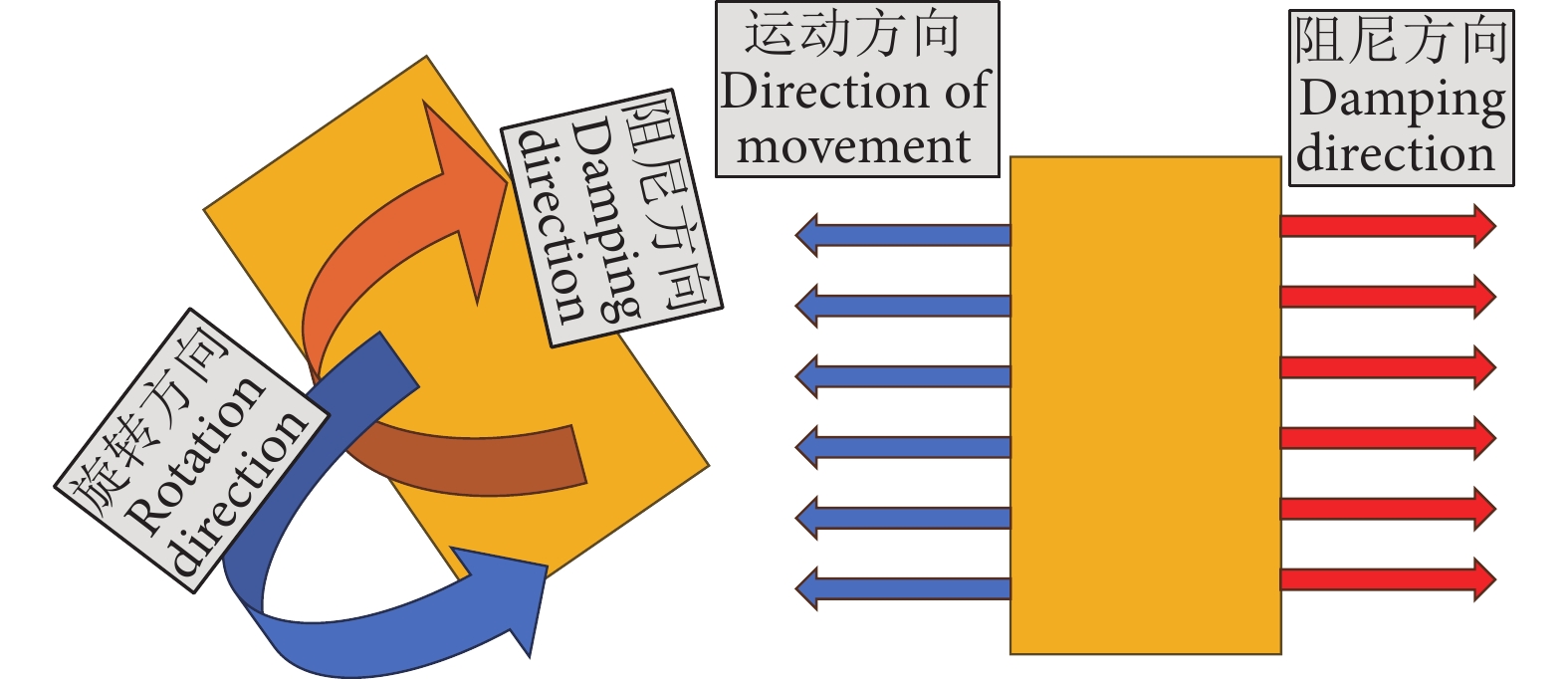
阻尼效应示意图
阻尼效应对机器人平动和转动的影响
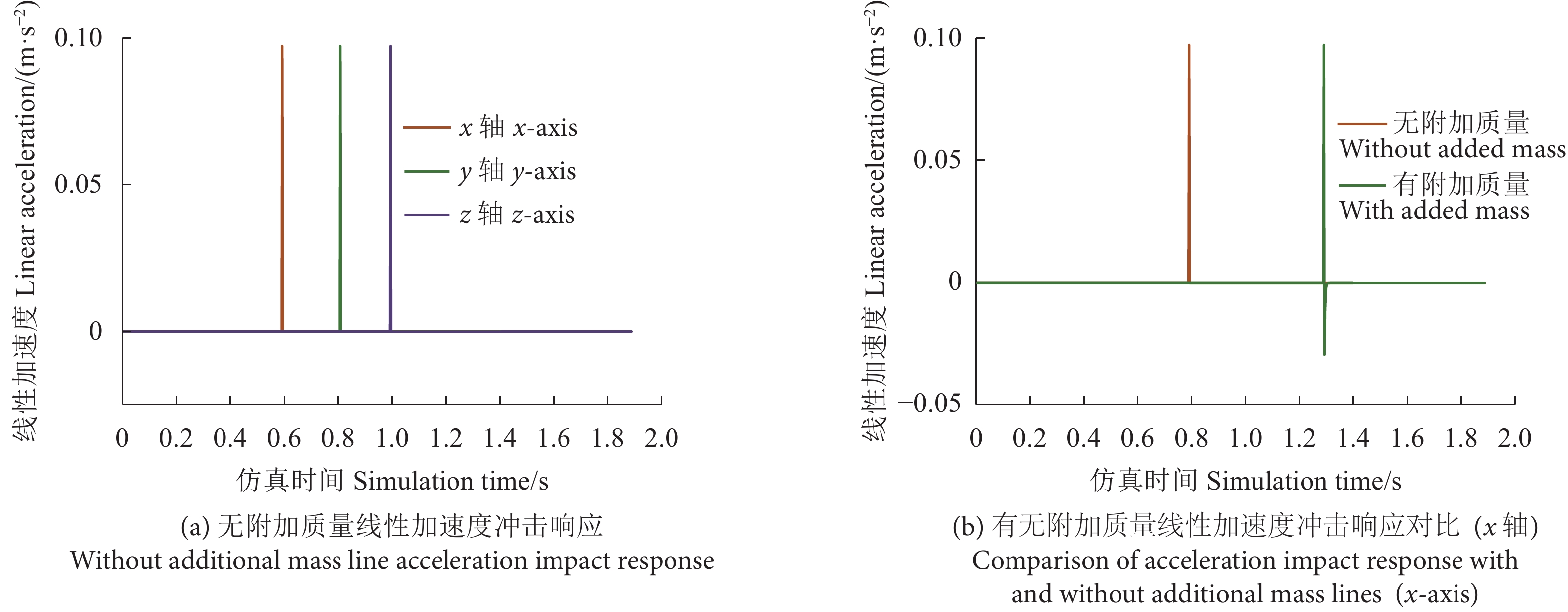
单位冲击对有无附加质量线性加速度的影响
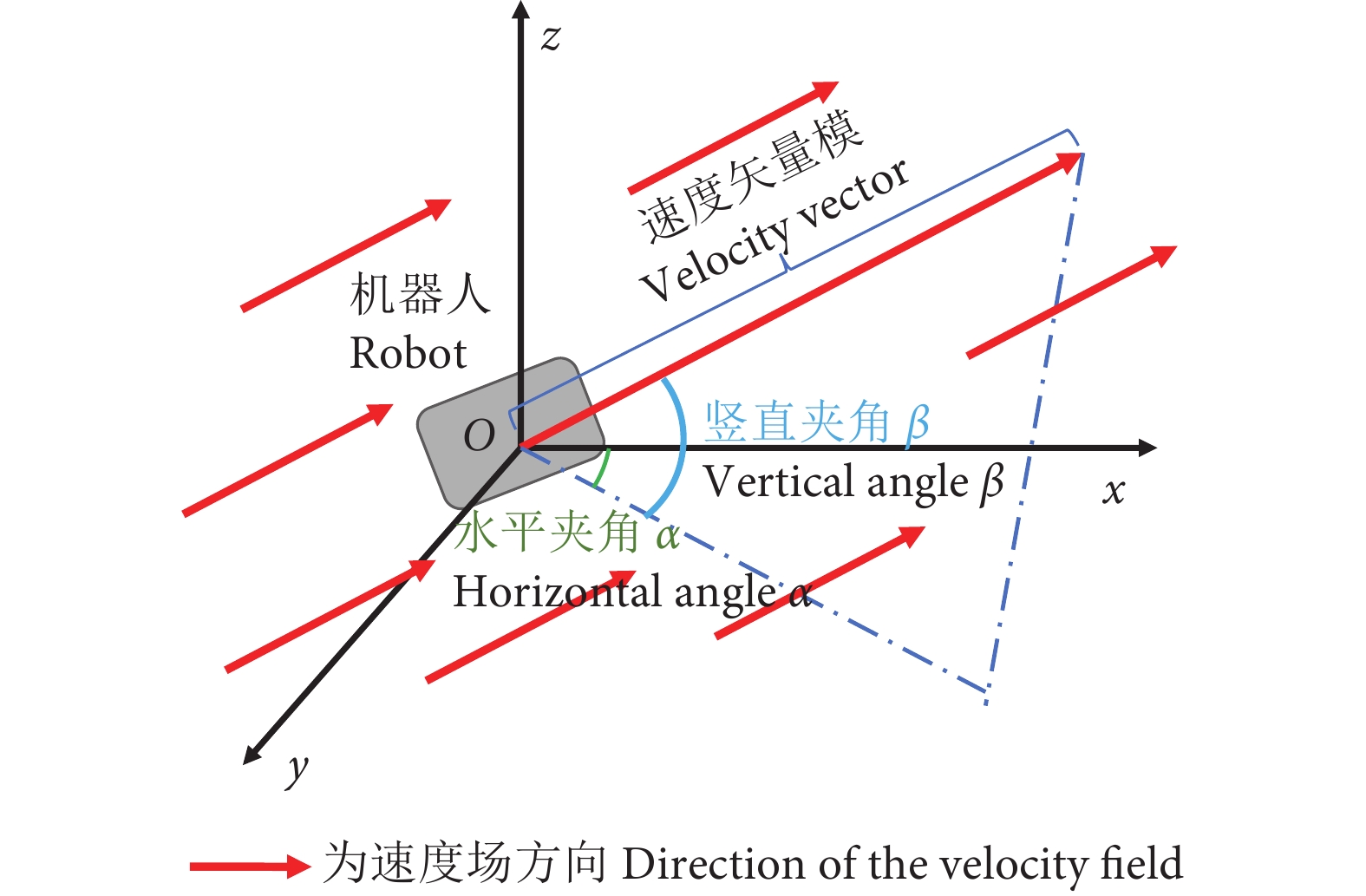
流场图
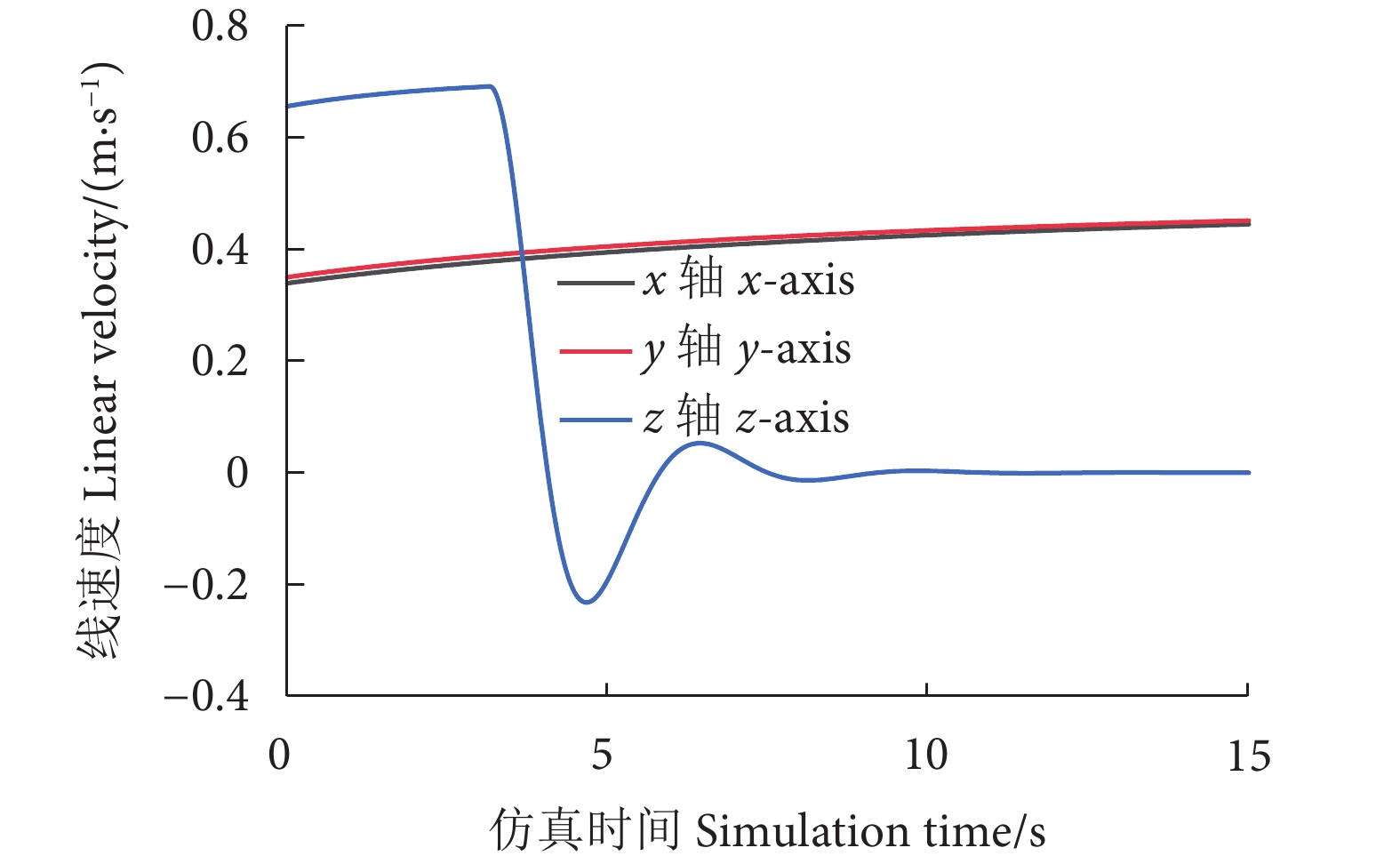
无高斯噪声流场下的线速度零输入零状态响应
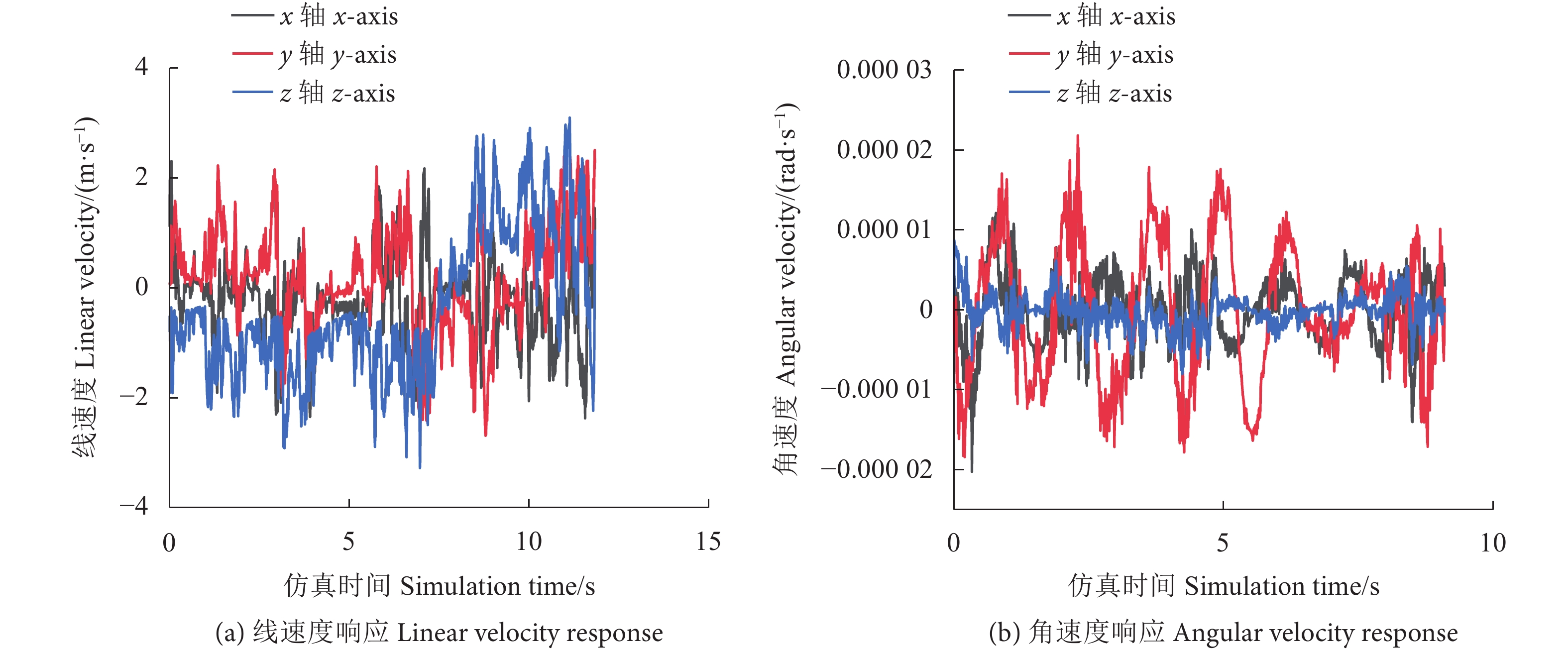
流场高斯噪声下的线速度和角速度零输入零状态响应
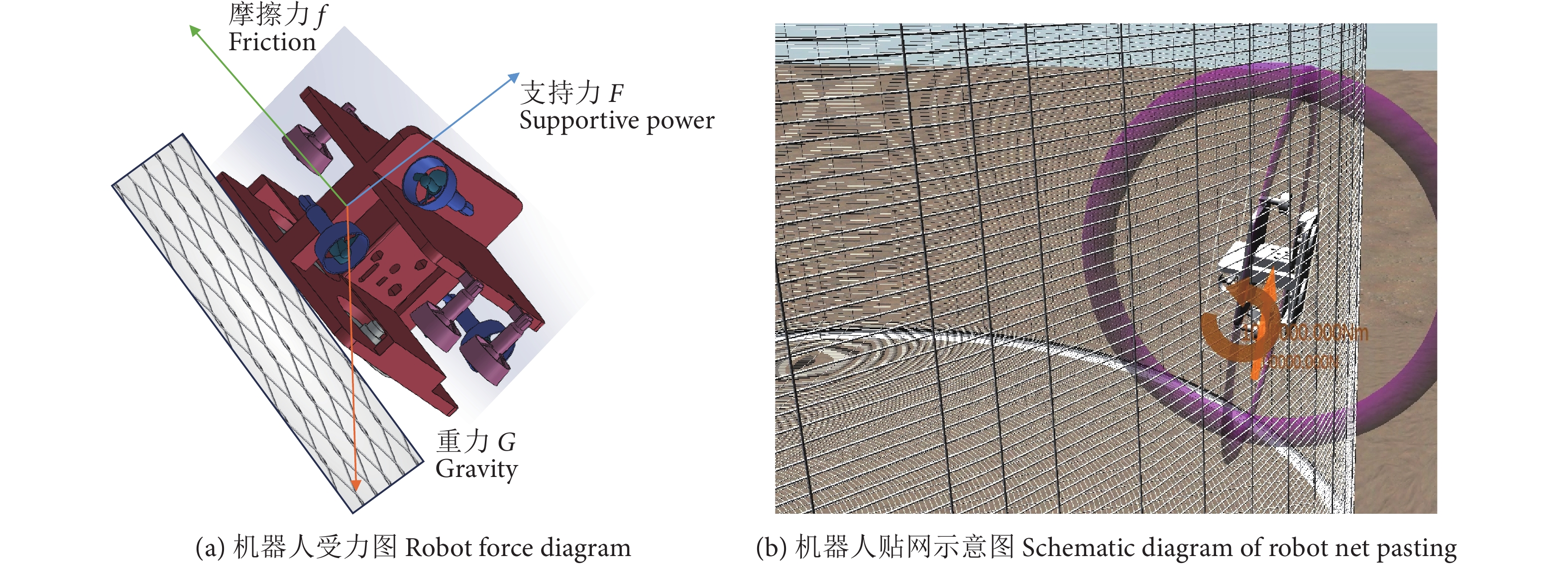
机器人在网箱表面的受力情况和贴网示意图
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式
 下载:
下载:

 粤公网安备 44010502001741号
粤公网安备 44010502001741号
