所有
全文检索
高级检索
首页
编委会
关于本刊
期刊简介
主编
期刊订阅
联系我们
投稿指南
本刊稿约
本刊规范
著作权协议
稿件出版流程
同行评议流程
作者费用
网络首发
伦理规则
期刊原则
出版伦理
学术不端认定
在线期刊
当期目录
优先发表
最新录用
过刊浏览
更正声明
English
所有
标题
作者
关键词
摘要
DOI
栏目
地址
基金
中图分类号
PACS
EEACC
首页
编委会
关于本刊
期刊简介
主编
期刊订阅
联系我们
投稿指南
本刊稿约
本刊规范
著作权协议
稿件出版流程
同行评议流程
作者费用
网络首发
伦理规则
期刊原则
出版伦理
学术不端认定
在线期刊
当期目录
优先发表
最新录用
过刊浏览
更正声明
English
下载:
全尺寸图片
幻灯片
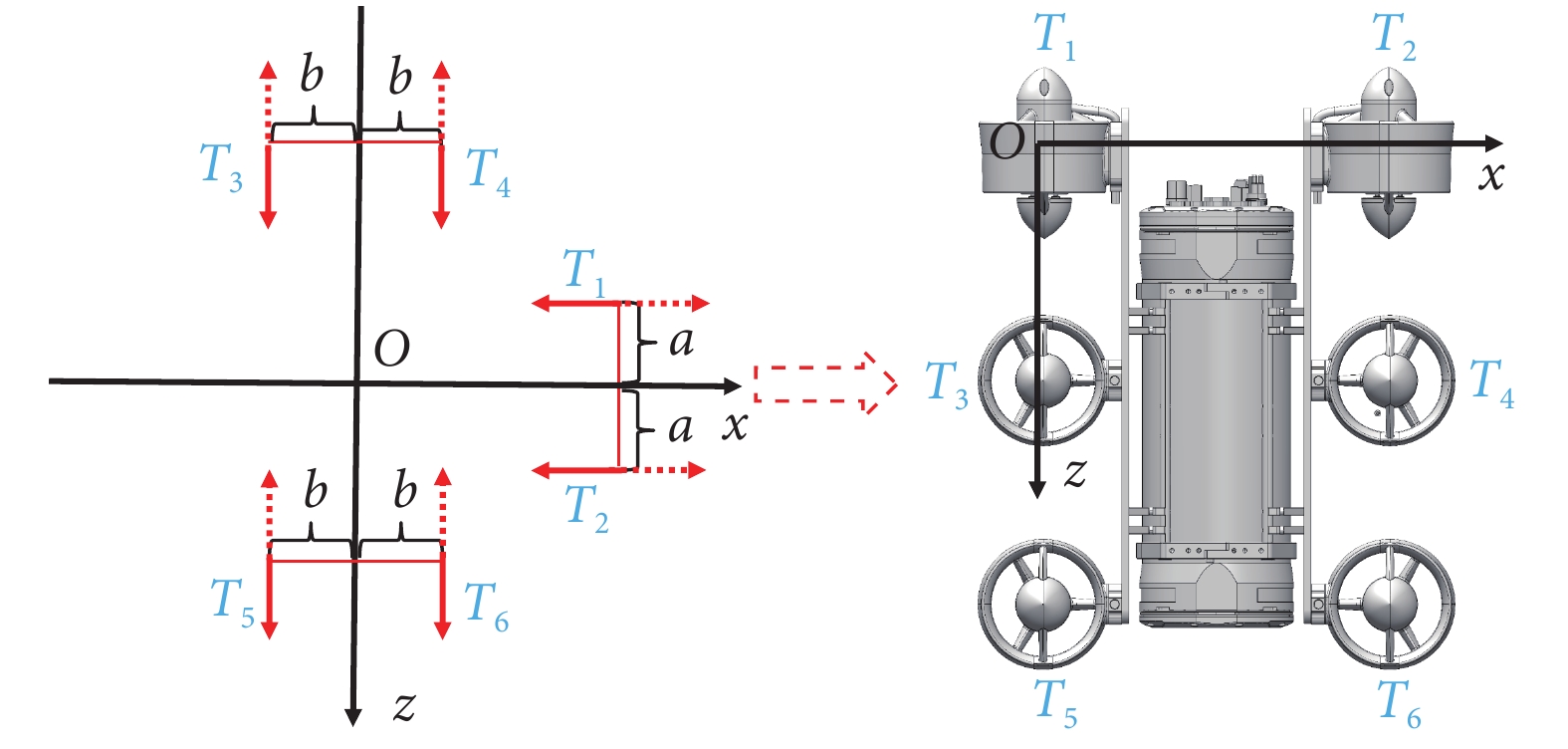
推进器分布图
2024, 20(1): 11-24.
养殖工船作业型水下机器人结构设计与研究 .
本文全文图片
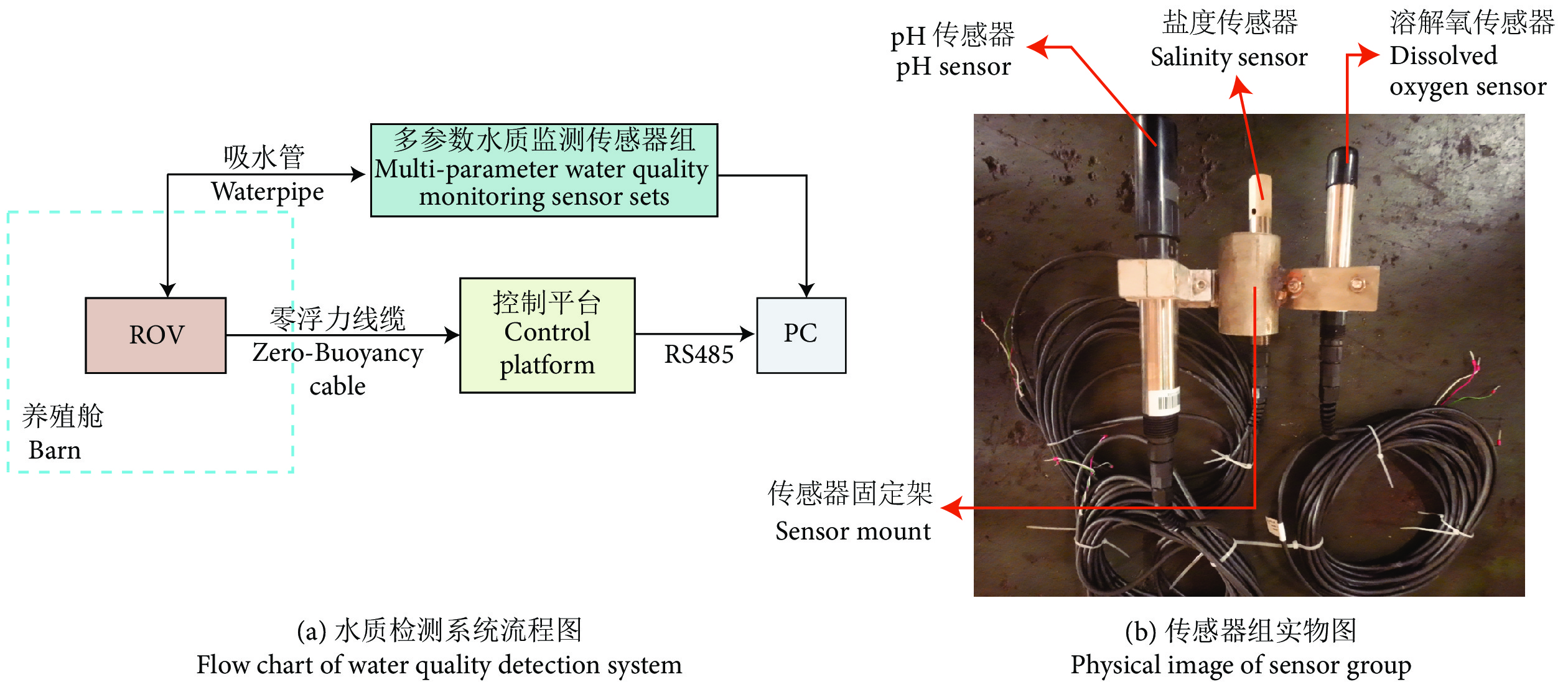
ROV水质检测系统设计
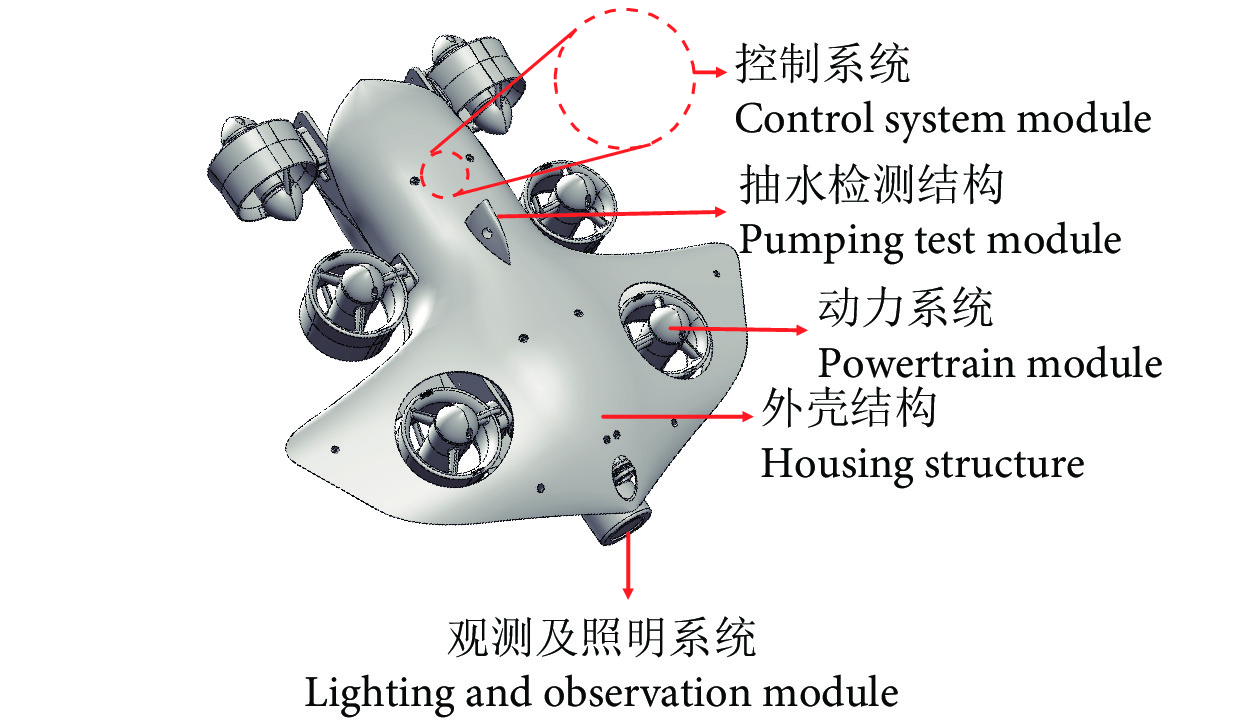
ROV系统组成
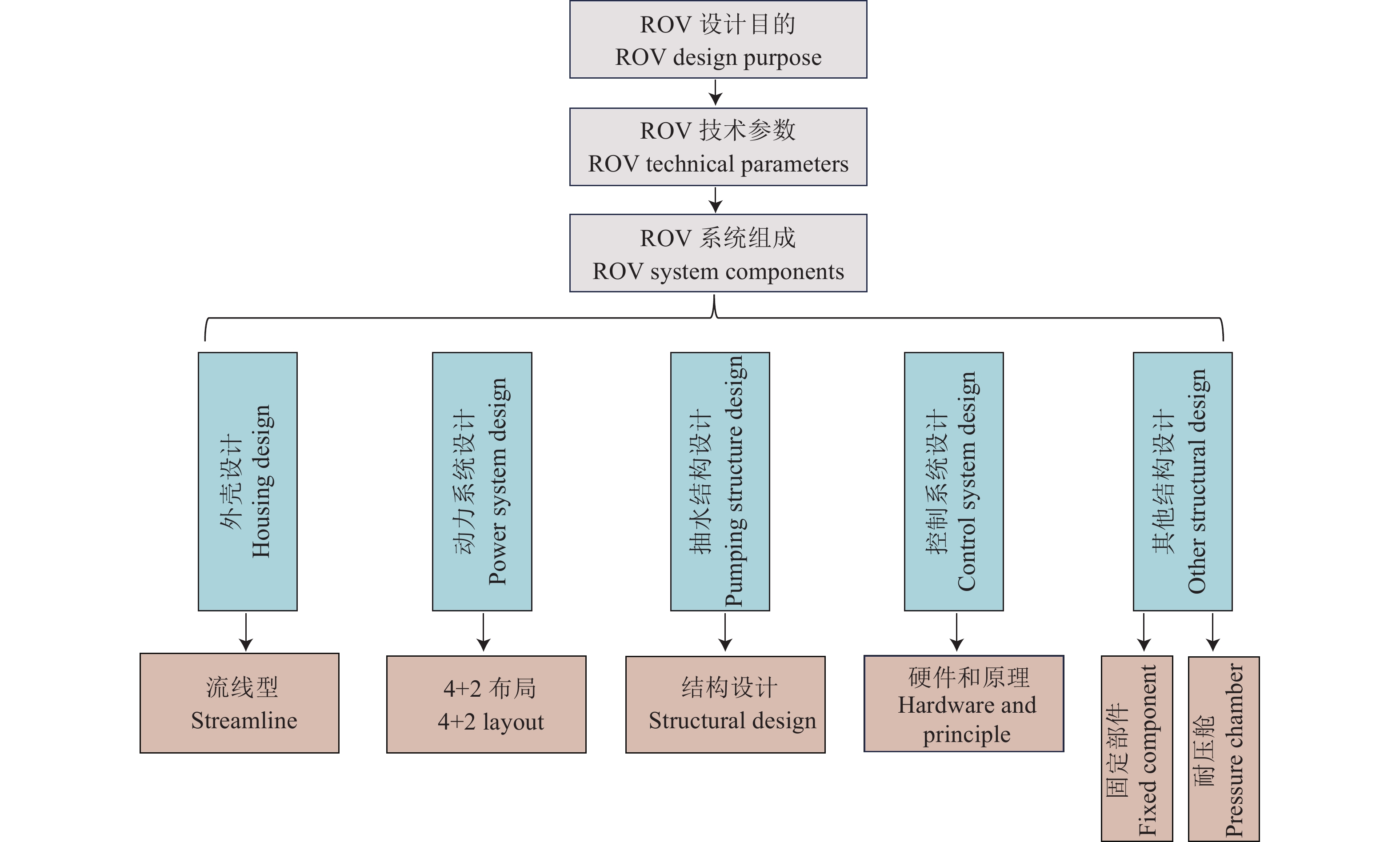
ROV系统设计流程图
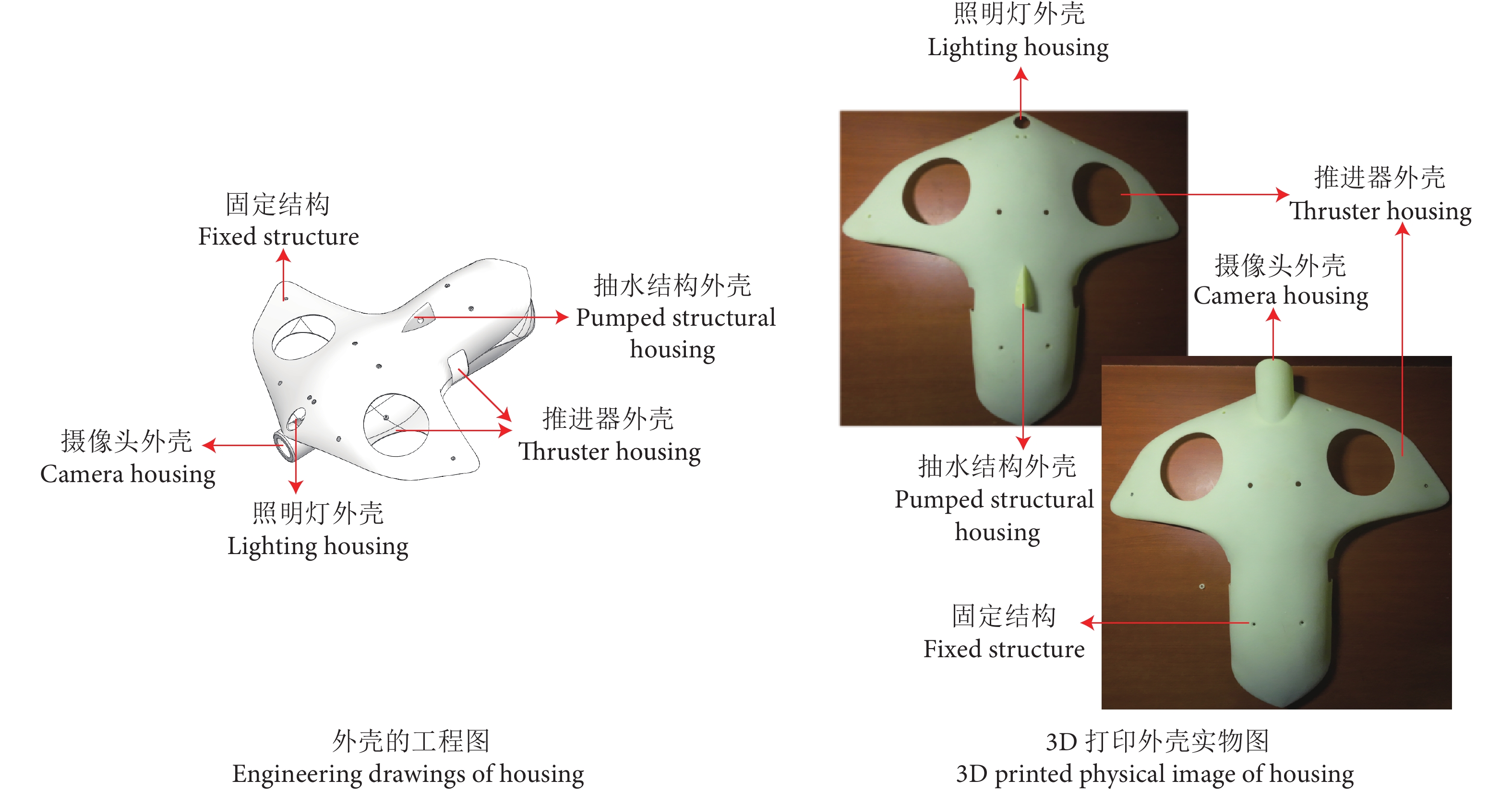
ROV外壳
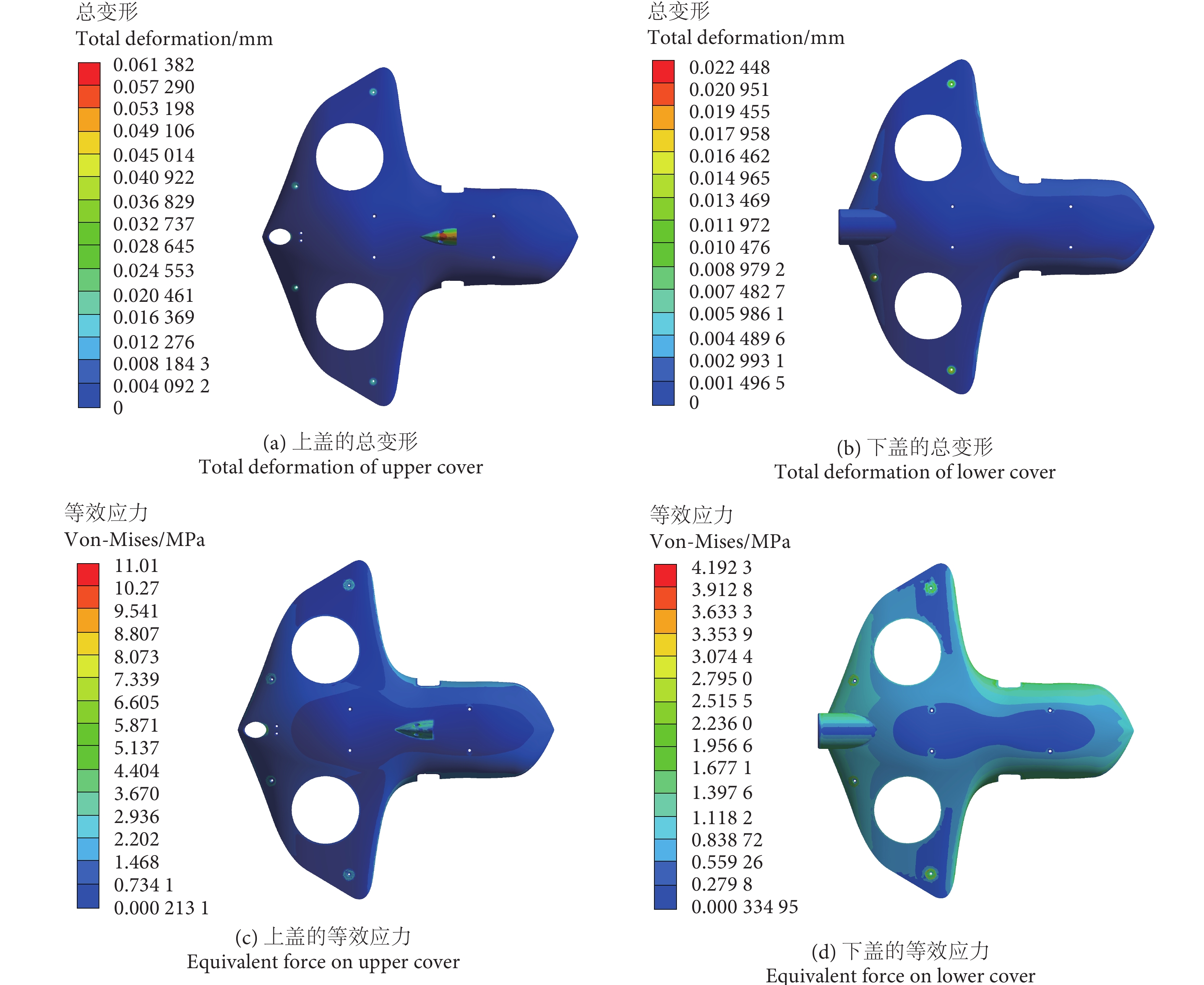
ROV上、下外壳数值模拟
推进器分布图
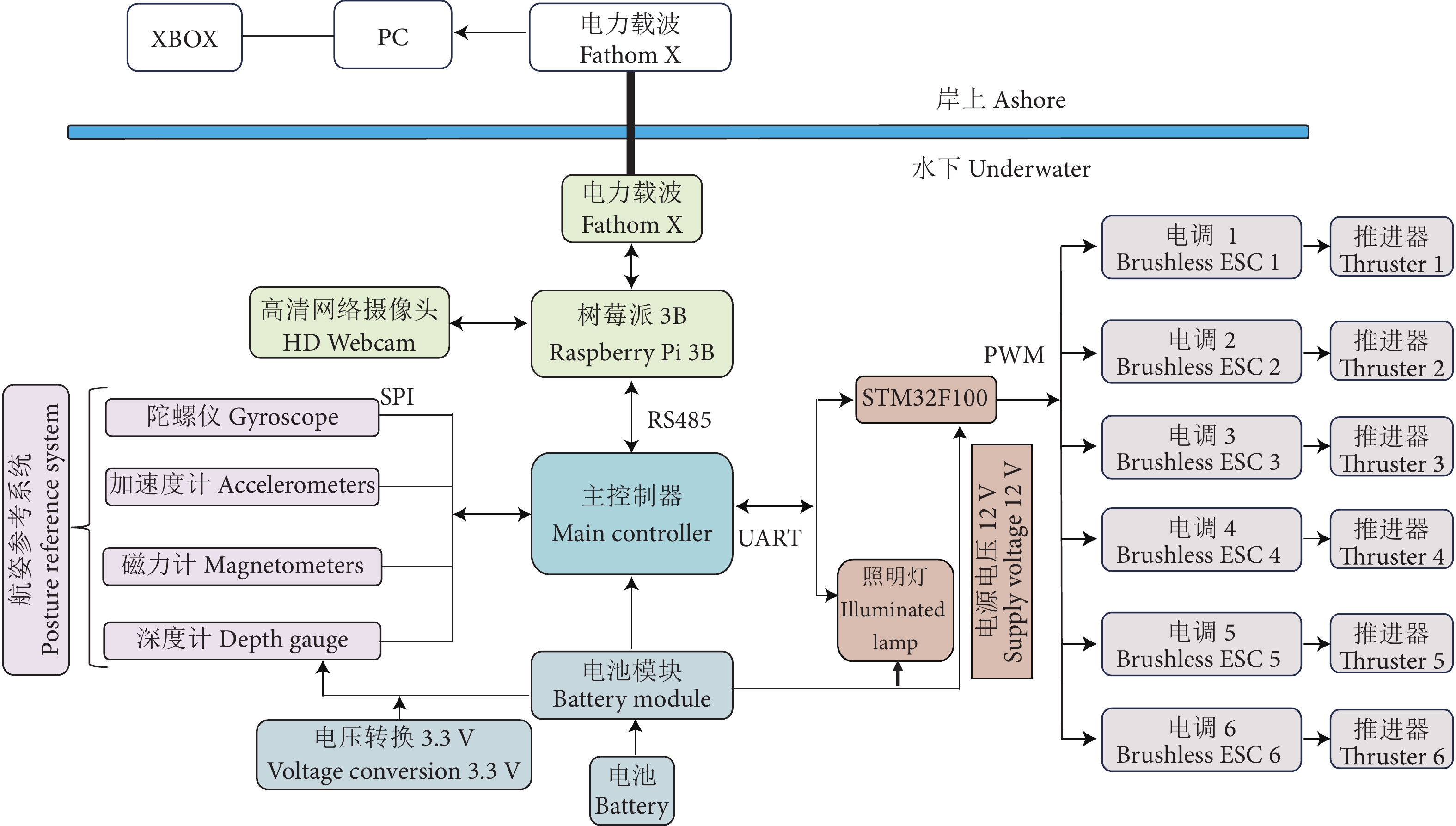
ROV控制系统原理图
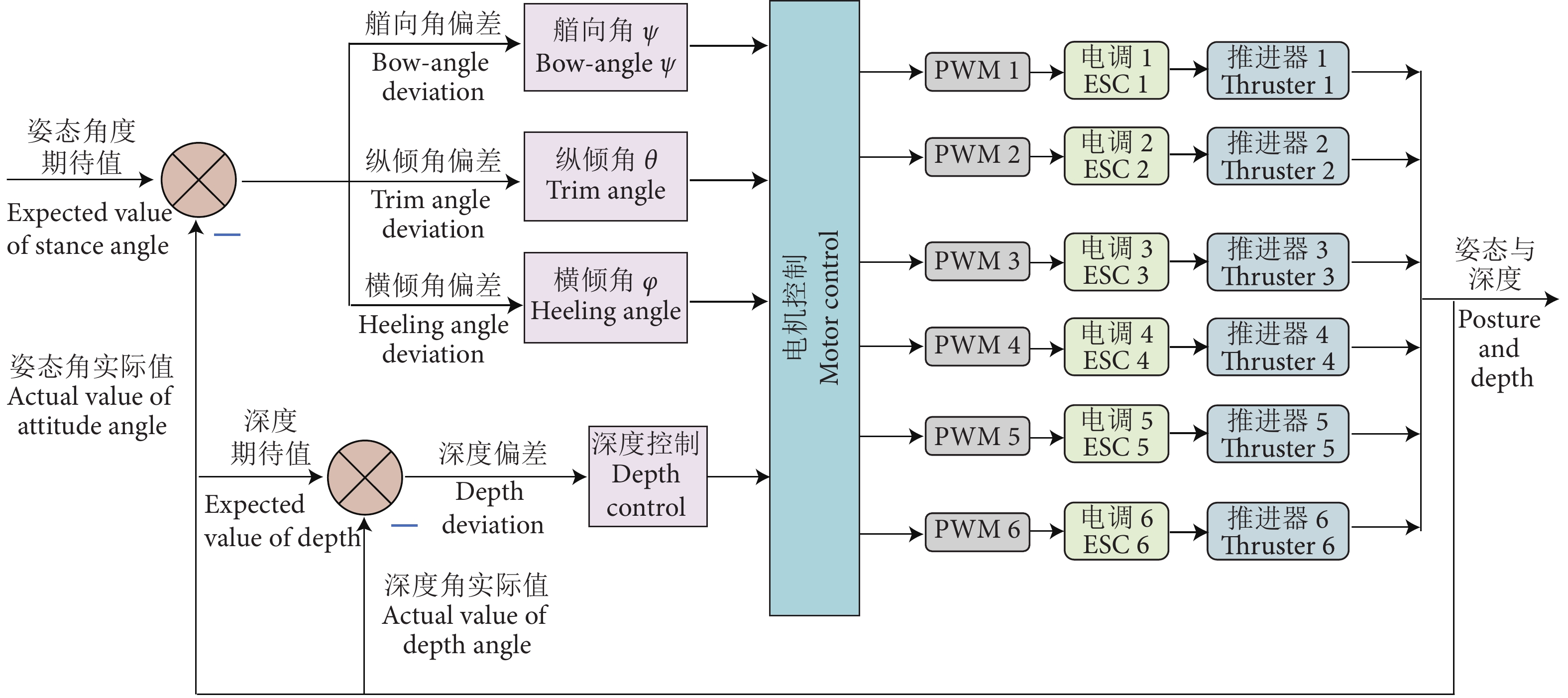
ROV姿态和深度控制原理图
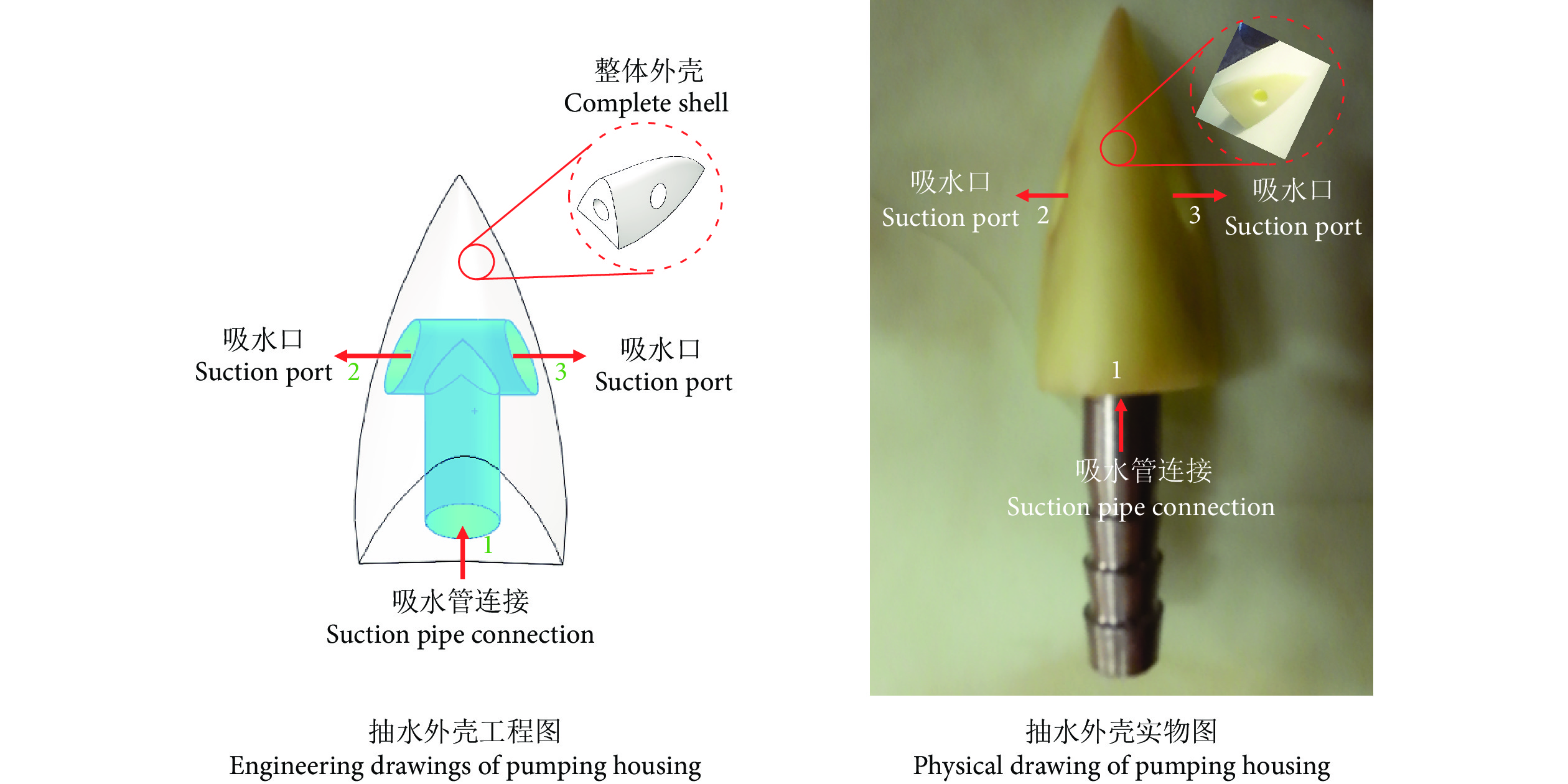
抽水外壳
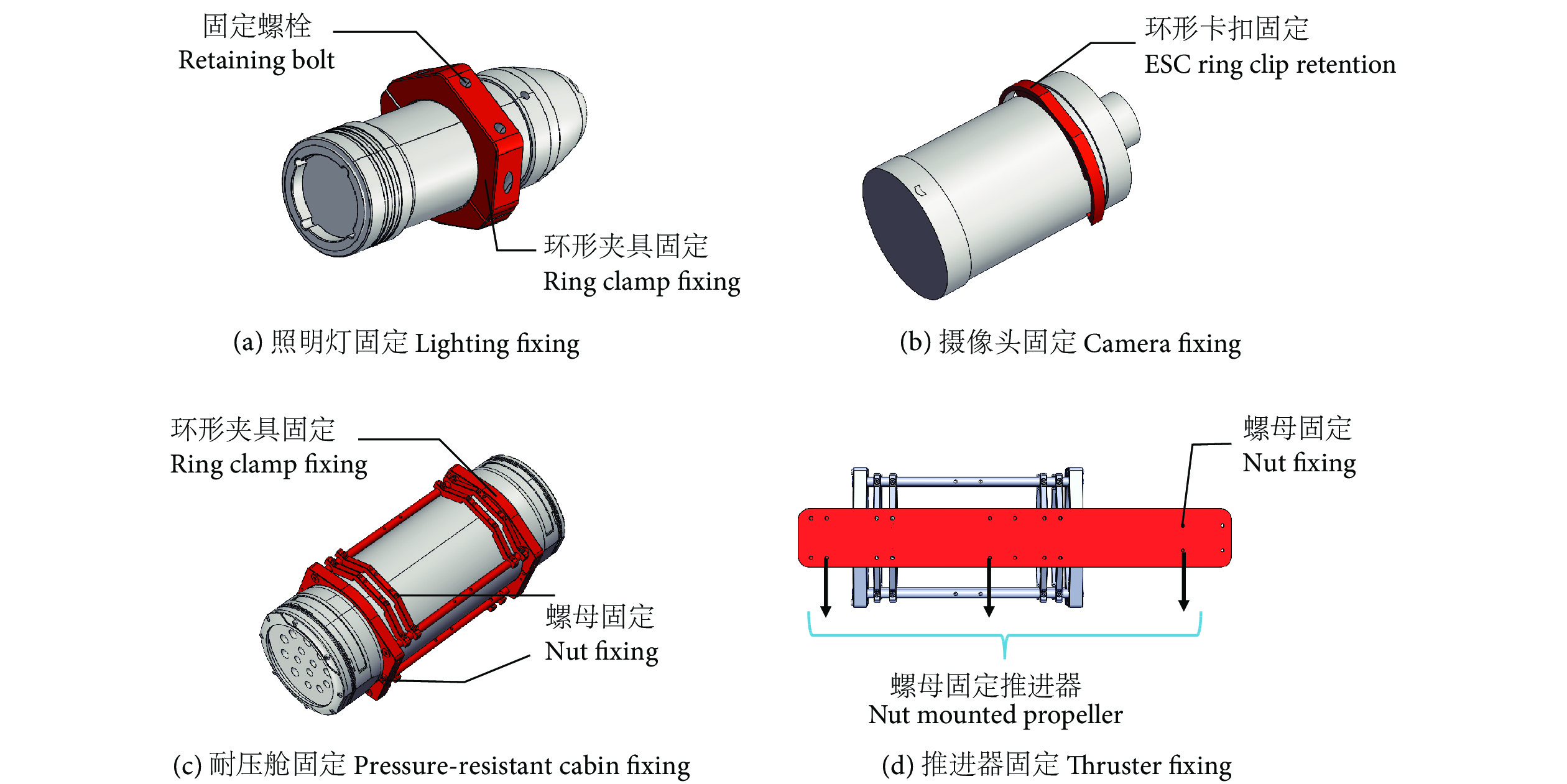
ROV的主要的固定结构
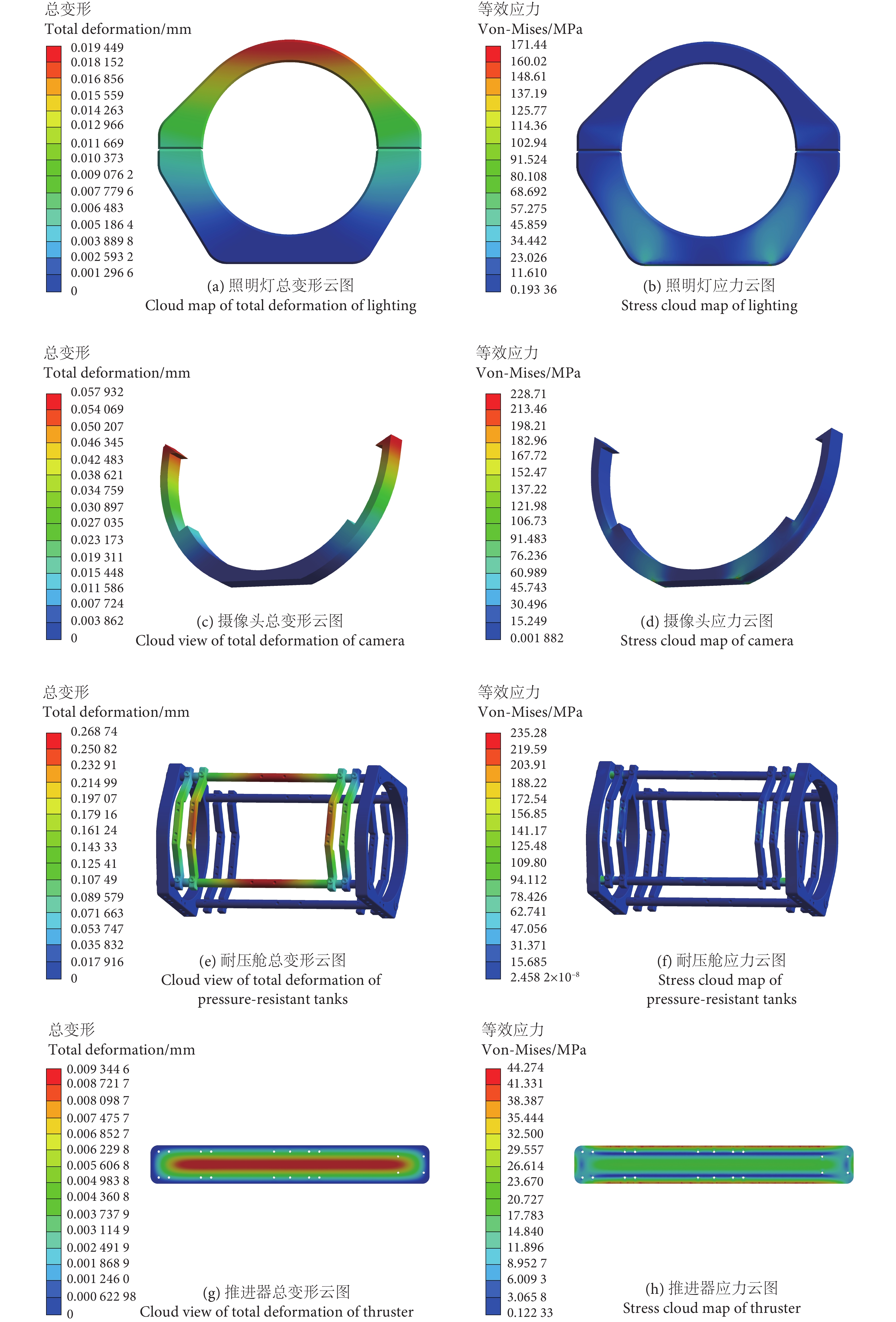
各个固定部件数值模拟云图
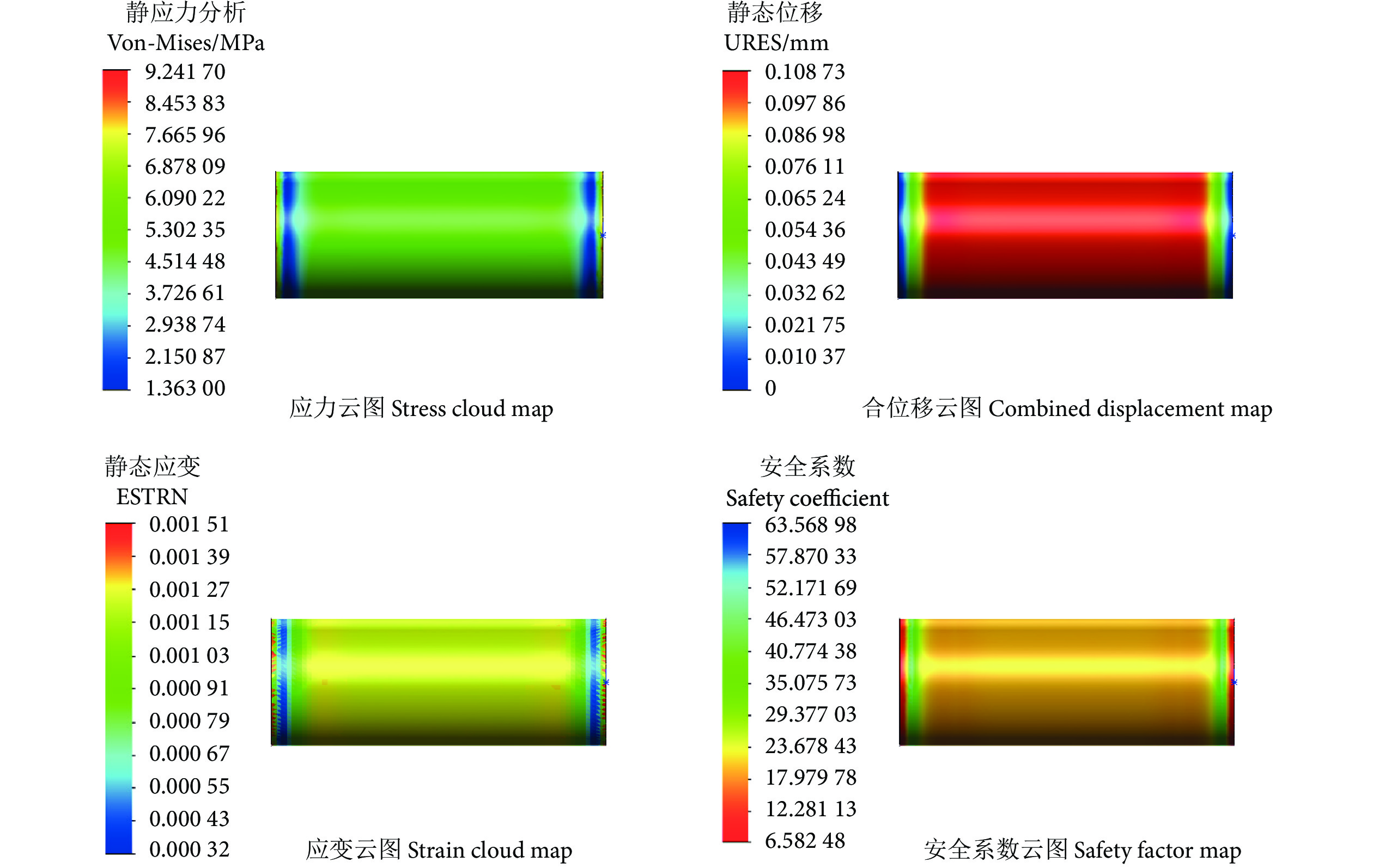
耐压舱数值模拟
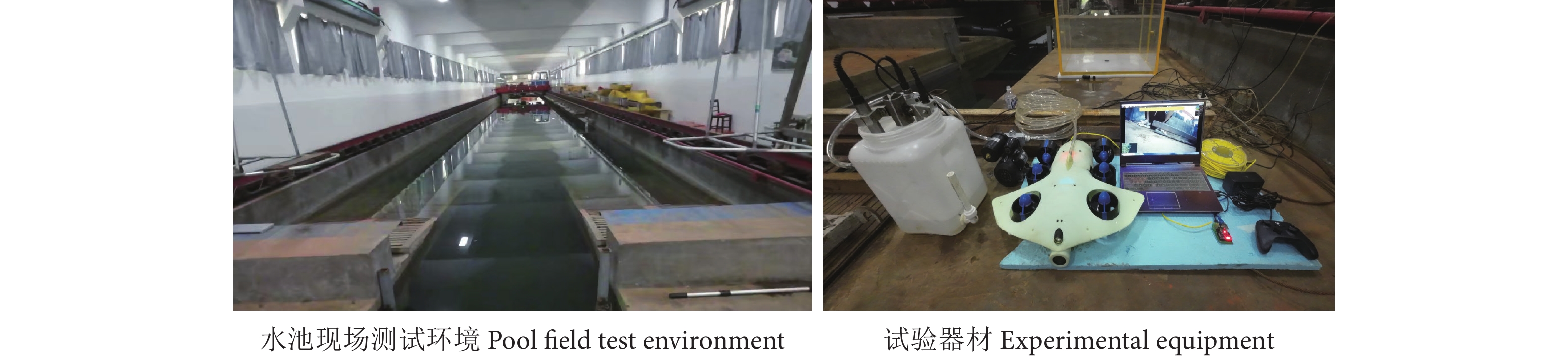
试验场地和器材
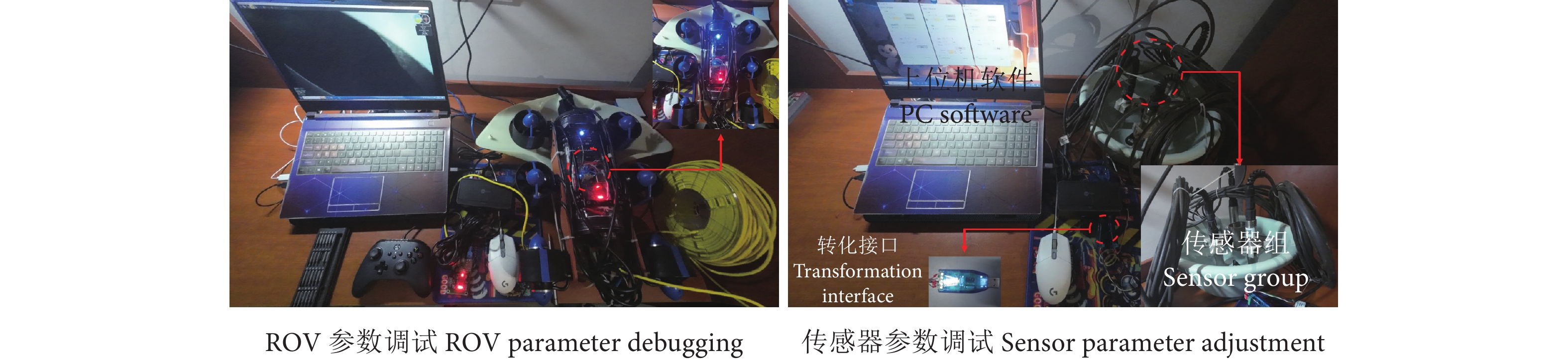
ROV控制系统软件和传感器数据采集软件调试
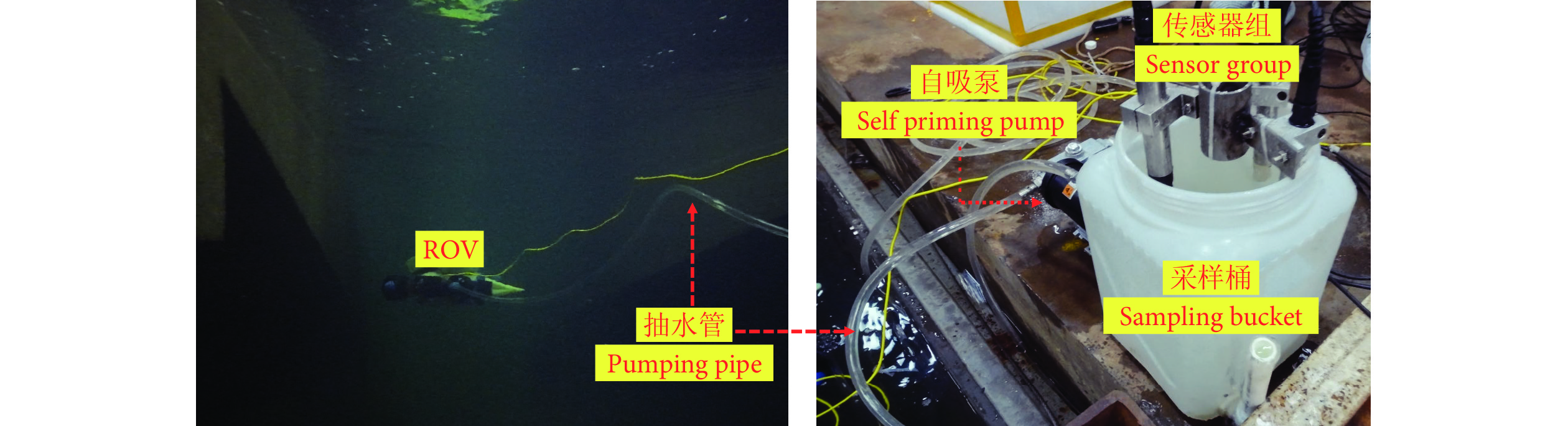
抽水及观测试验
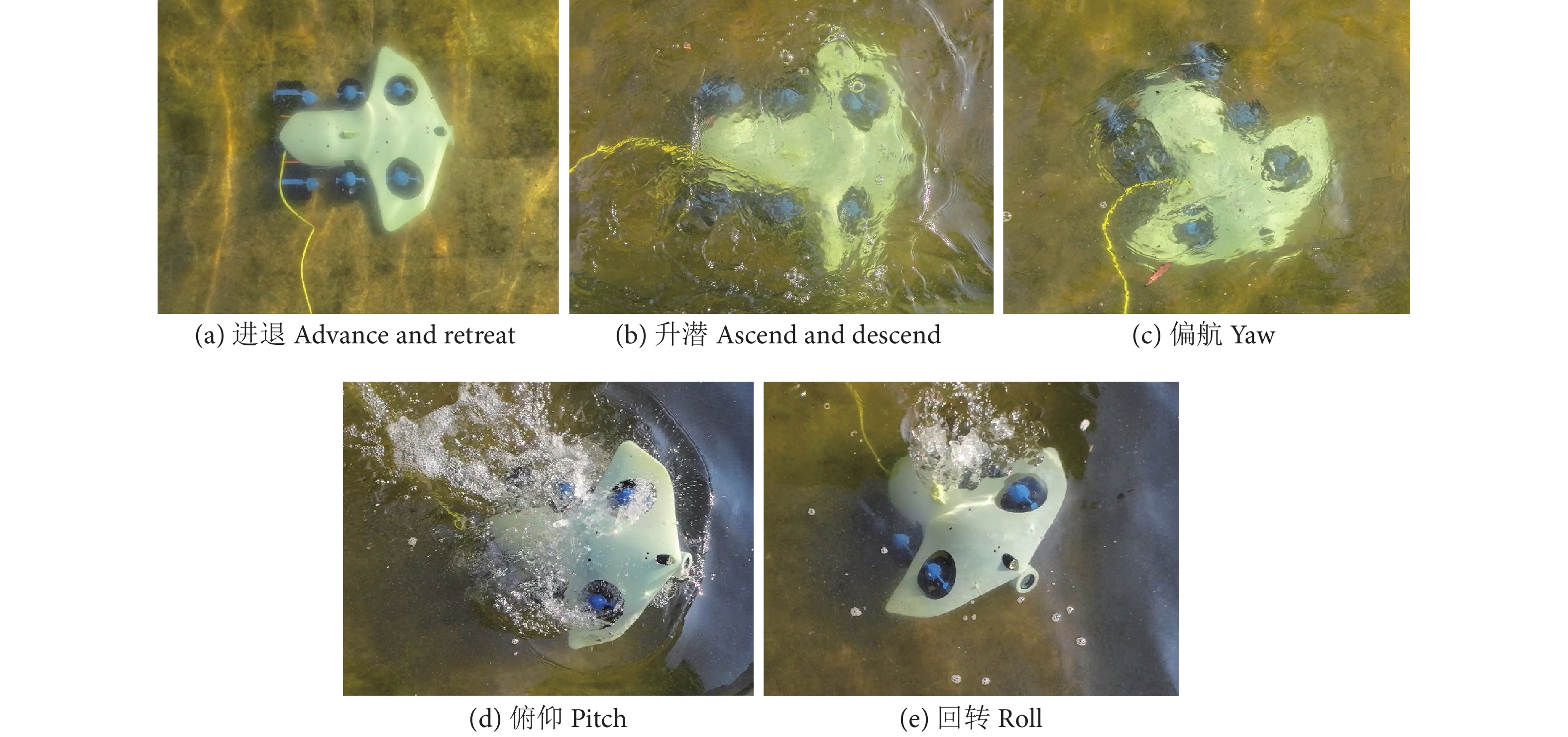
ROV自由度测试
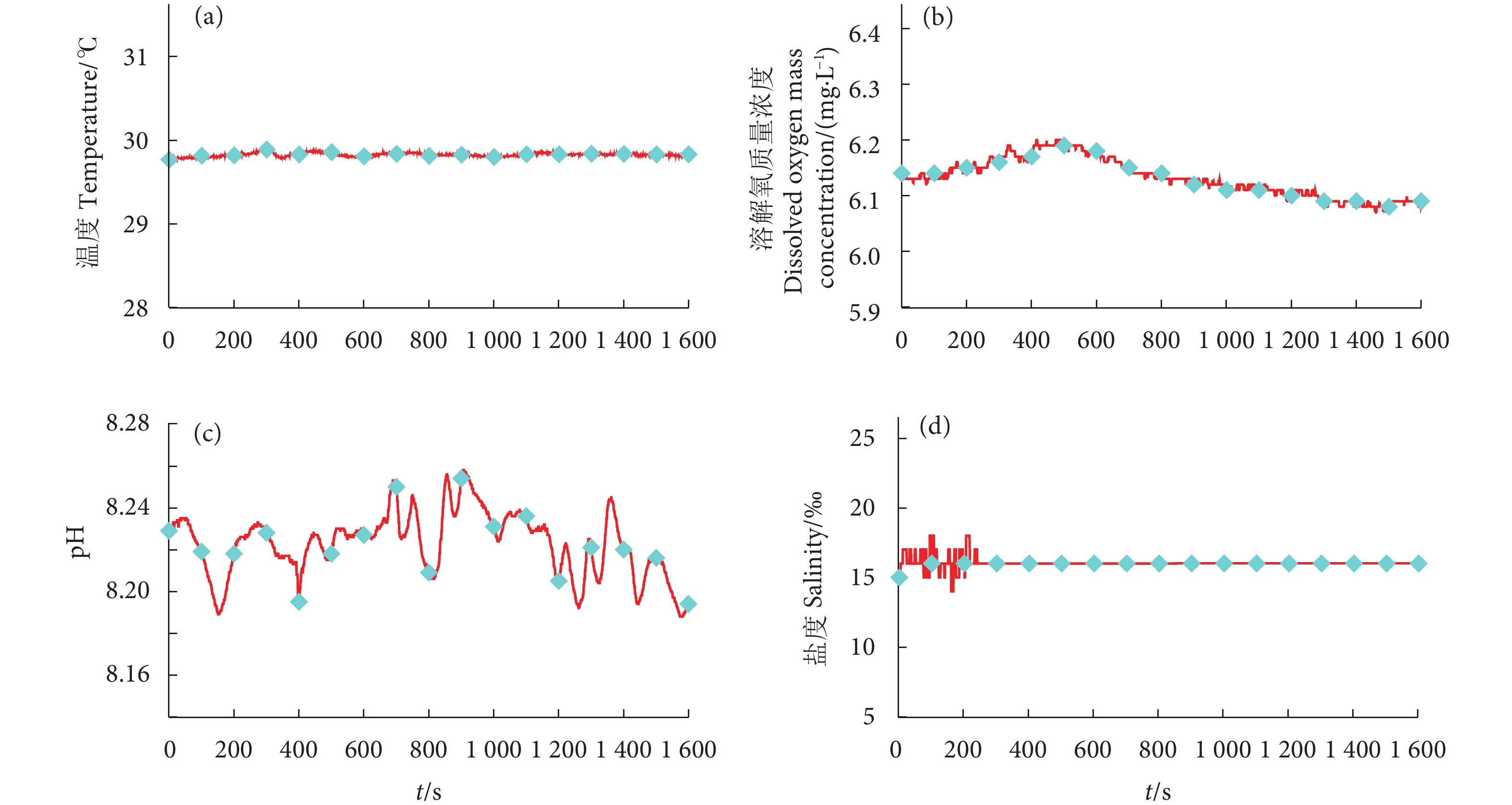
ROV在水深1 m的温度、溶解氧、pH和盐度变化
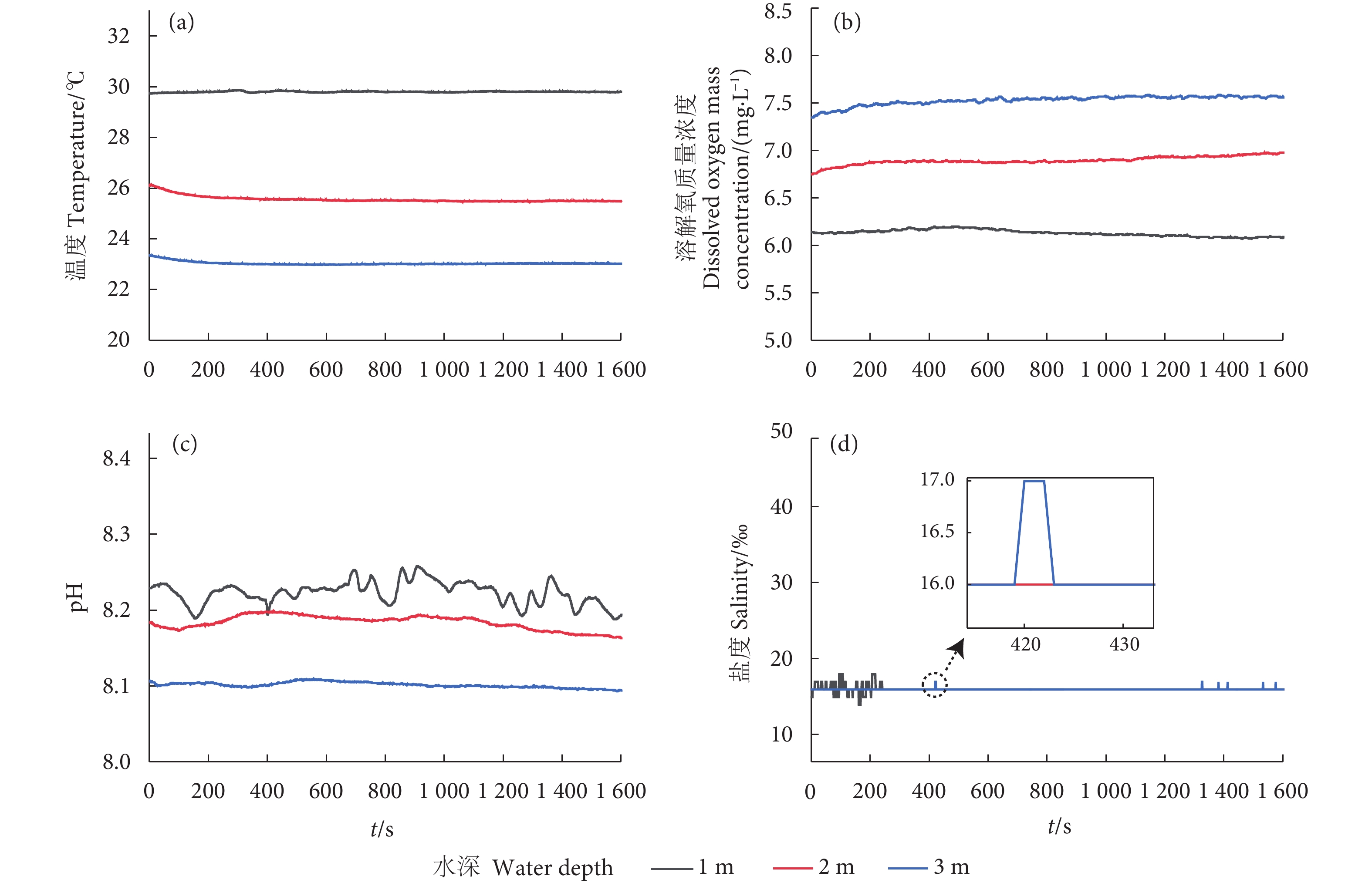
ROV在不同水深的温度、溶解氧、pH和盐度变化
×
Close
导出文件
文件类别
RIS(可直接使用Endnote编辑器进行编辑)
Bib(可直接使用Latex编辑器进行编辑)
Txt
引用内容
引文——仅导出文章的Citation信息
引文和摘要——导出文章的Citation信息和文章摘要信息
×
Close
引用参考文献格式
 下载:
下载:
 粤公网安备 44010502001741号
粤公网安备 44010502001741号
