
Study on fish movement monitoring method based on image processing
-
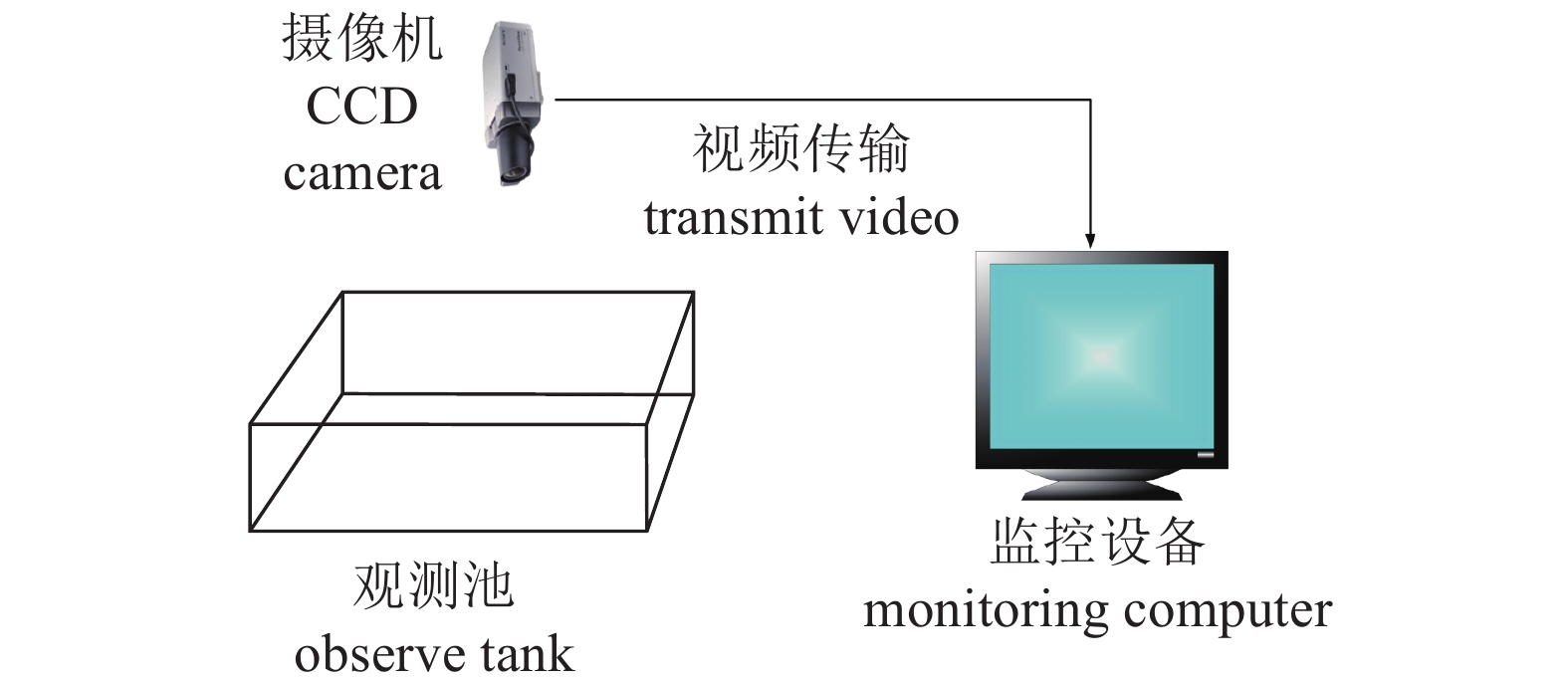
摘要: 鱼类运动行为的观察能够为鱼类健康监控提供直观信息,而通过人工标定的方式监测鱼群运动行为耗时长、效率低。文章针对鱼类运动行为的监测问题,提出一种基于图像处理技术的罗非鱼运动监测方法。首先利用计算机、CCD高清摄像机获取鱼群运动视频,再对图像进行滤波去噪、灰度等处理;通过Ostu阈值分割法改进Canny边缘检测算法提取鱼群的边缘轮廓;在建立鱼群运动模型的基础上结合目标关联匹配算法,实现罗非鱼运动行为的跟踪和监测。结果显示鱼群的个体检出率为98.96%,轨迹完整度为97%。提出的算法比卡尔曼滤波的轨迹跟踪监测效果略有提升,能够较好地完成鱼群的运动跟踪和动态监测。Abstract: Observation of fish behavior provides rich visual information for fish health monitoring. However, the method of monitoring the fish behavior by manual marking is time-consuming and inefficient. In order to solve the problem of fish behavior monitoring, a method of monitoring tilapia movement based on image processing is proposed. These fish movement videos were first collected by computer and CCD camera, and then pretreated by graying and filtering. The Canny detection algorithm improved by Otsu was used to extract the edge of fish. Based on modelling the motion of fish school and combining the objective matching algorithm, the tracking and monitoring of fish school can be realized well. The results show that the individual detection rate of fish school was 98.96%, and the trajectory available factor (TAF) was 97%. The proposed algorithm can improve monitoring performance, better than Kalman algorithm, and can realize fish school tracking and monitoring.
-
Keywords:
- fish school /
- movement behavior /
- monitoring /
- image processing /
- extended Kalman filter
-
-
![]()
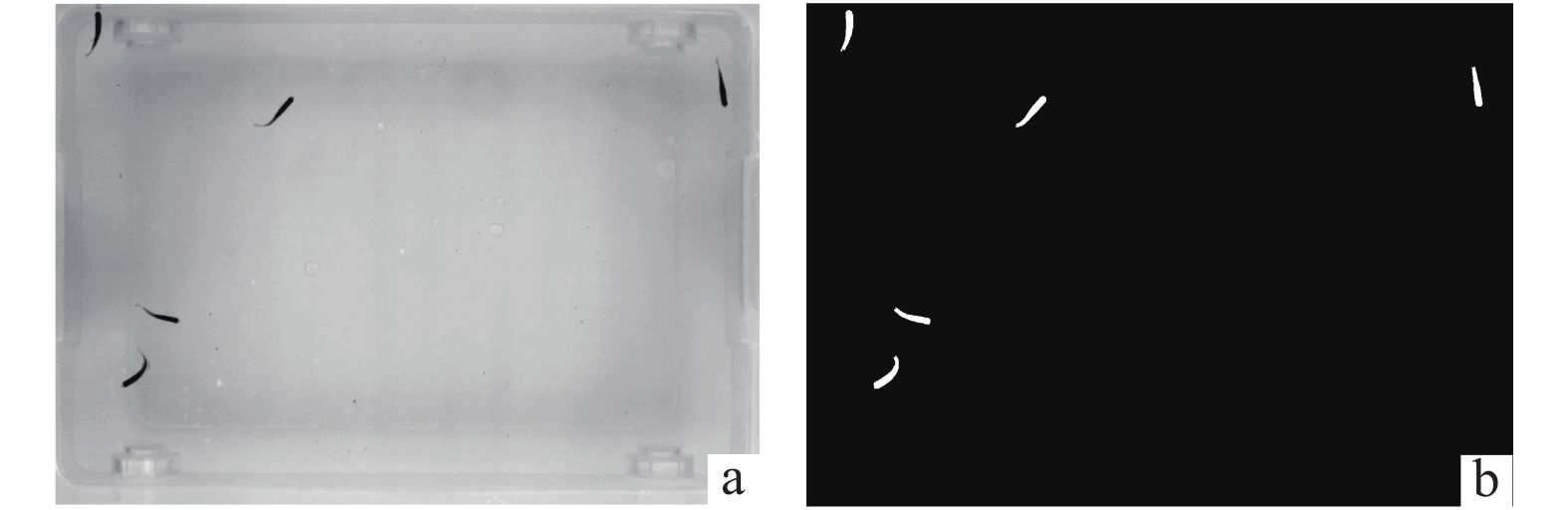
图 2 目标检测灰度图 (a) 和目标检测结果图 (b)
Figure 2. Grayscale image of object detection (a) and object detection image (b)
表 1 轨迹跟踪统计表
Table 1 Trajectory tracking statistics
方法
method轨迹断裂程度
TFF轨迹完整程度/%
TAF本文方法 extended Kalman algorithm 2.0 97.0 对比方法
Kalman algorithm3.6 93.6  下载: 导出CSV
下载: 导出CSV
-
[1] 张慧. 鱼类群体行为特性分析及应激仿真技术研究[D]. 舟山: 浙江海洋大学, 2017:1-7. [2] 颜鹏东, 谭均军, 高柱, 等. 基于视频跟踪的竖缝式鱼道内鱼类运动行为分析[J]. 水生生物学报, 2018, 42(2): 250-254. [3] 谭均军, 高柱, 戴会超, 等. 竖缝式鱼道水力特性与鱼类运动特性相关性分析[J]. 水利学报, 2017, 48(8): 924-932. [4] 李相军, 李壮. 地面红外运动目标图像处理与识别算法分析[J]. 舰船电子工程, 2013, 33(5): 53-56. [5] MILLER N, GERLAI R. Quantification of shoaling behaviour in zebrafish (Danio rerio)[J]. Behav Brain Res, 2007, 184(2): 157-166.
[6] 范良忠, 刘鹰, 余心杰, 等. 基于计算机视觉技术的运动鱼检测算法[J]. 农业工程学报, 2011, 27(7): 226-230. [7] 江丹丹, 桂福坤. 基于视频图像的鱼类行为轨迹追踪[J]. 浙江海洋学院学报(自然科学版), 2015, 34(2): 112-118. [8] 朱佩儒, 刘烨, 王硕鸿, 等. 基于学习的斑马鱼检测与跟踪[J]. 计算机应用与软件, 2015, 32(9): 227-230, 250. [9] 张琪, 韩战钢. 一种简单有效的鱼群轨迹追踪算法[J]. 北京师范大学学报(自然科学版), 2017, 53(4): 406-411. [10] TELES L O, FERNANDES M, AMORIM J A. Video-tracking of zebrafish (Danio rerio) as a biological early warning system using two distinct artificial neural networks: probabilistic neural network (PNN) and self-organizing map (SOM)[J]. Aquat Toxicol, 2015, 165: 241-248.
[11] SABERIOON M M, CISAR P. Automated multiple fish tracking in three-dimension using a Structured Light Sensor[J]. Comput Electron Agric, 2016, 121: 215-221.
[12] MAO J F, XIAO G, SHENG W G, et al. Research on realizing the 3D occlusion tracking location method of fish's school target[J]. Neurocomputing, 2016, 214: 61-79.
[13] 石龙伟, 邓欣, 王进, 等. 基于光流法和卡尔曼滤波的多目标跟踪[J]. 计算机应用, 2017, 37(s1): 131-136. [14] 毛家发, 胡海彪, 程振波, 等. 半遮挡目标鱼体的识别与跟踪方法研究[J]. 浙江工业大学学报, 2015, 43(2): 207-211. [15] 李波. 视频序列中运动目标检测与跟踪算法的研究[D]. 北京: 北京交通大学, 2011: 7-16. [16] 孙亮, 李敬文. 一种简单的灰度图像边缘检测算法[J]. 兰州交通大学学报, 2013, 32(1): 111-115. [17] 陈益杉, 卢伟, 王玲, 等. 基于GIF-Shearlet算法的新旧土边界线视觉导航技术研究[J]. 农业现代化研究, 2017, 38(2): 343-351. [18] 郭萌, 胡辽林, 赵江涛. 基于Kirsch和Canny算子的陶瓷碗表面缺陷检测方法[J]. 光学学报, 2016, 36(9): 27-33. [19] GOULART J T, BASSANI R A, MAGALHAES BASSANI J W. Application based on the Canny edge detection algorithm for recording contractions of isolated cardiac myocytes[J]. Comput Biol Med, 2017, 81: 106-110.
[20] JIANG W, ZHOU H, SHEN Y, et al. Image segmentation with pulse-coupled neural network and Canny operators[J]. Comput Electr Eng, 2015, 46: 528-538.
[21] 林国余, 张为公. 基于进化规划的最大类间方差的图像分割算法[J]. 传感技术学报, 2006, 19(1): 179-182. [22] 刘丽娟, 刘仲鹏, 程芳. 玉米生长期叶部病害图像识别预处理研究[J]. 河南农业科学, 2013, 42(10): 91-94. [23] 朱琳, 周杰, 宋靖雁. 一种新的基于在线采样的多物体跟踪方法[J]. 计算机学报, 2008, 31(1): 151-160. [24] KULIKOVA M V, KULIKOV G Y. NIRK-based accurate continuous-discrete extended Kalman filters for estimating continuous-time stochastic target tracking models[J]. J Comput Appl Math, 2016, 316: 260-270.
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
 粤公网安备 44010502001741号
粤公网安备 44010502001741号
