
Design of metering device for deep-sea cage auto feeding system
-
摘要:
计量装置是深水网箱养殖自动投饵系统装备中精准投饵的关键。由于不同型号的饲料颗粒密度与体积存在差异,投饵进程中饲料密实度不断变化,导致投饵系统存在计量不准、误差较大的缺点。利用科里奥利力学原理,开发出一种不受饲料特性与重力场变化影响的计量系统装置,进行了装置的整体设计、框架构建,分析了关键参数的测量与计算方法。采用DSP数字信号处理器为控制核心,通过对扭矩与转速的测量与反馈控制,对计量误差进行动态校正,运用PID控制方法实时控制转速,从而精确控制计量给料。该装置能满足颗粒饲料精准计量和定量给料的要求,结构简单,计量精确度可达±1%,量程范围为0~15 t·h-1,适合深水网箱集约化养殖精确投饵操作和管理。
Abstract:Metering device is key to precise feeding in deep-sea cage auto feeding system. Difference in density and volume of various types of granulated feed, as well as constantly changing density of feed during feeding process cause inaccurate measurement and error in feeding system. Based on Coriolis mechanics, we designed a metering device that is not influenced by feed properties nor variation in gravitational field by establishing its framework, analyzing the measurement and calculation for the key parameters. The system uses DSP (digital signal processor) as control core, dynamically correcting measurement error and adopting PID control method to real-time control rotational speed by measuring and feedback-controlling the torque and rotation speed, so as to precisely control the meter-feeding. The device with simple structure, which meets the requirements of precise measurement and quantitative feeding of granulated feed, can obtain measurement precision of ±1% and range of measuremet of 0~15 t·h-1, and is suitable for operations and management of precise feeding for intensive deep-sea cage aquaculture.
-
Keywords:
- deep-sea cage /
- auto feeding /
- metering
-
臭氧 (O3) 是氧气 (O2) 的一种同素异形体,常温下的臭氧气体在浓度过高时会呈现出淡蓝色,产生的气味与鱼腥味类似,因此被命名为臭氧[1]。臭氧由氧分子携带一个氧原子构成[2],连接这个氧原子的化学键键能较低,因此形成的结构很不稳定,在常温下容易被还原成氧气[3]。在相同温度下,臭氧在水中的半衰期比在空气中的短,把臭氧水冻结成臭氧冰可以更好地延长其半衰期,有利于臭氧的保存并扩大其应用范围[4]。
臭氧作为一种强氧化剂,具有杀灭各种细菌和病毒、除臭、去色、降解有机物等功能[5],还能分解为氧气,不会残留异味或有毒有害物质;臭氧完全分解后不会对环境和人体健康造成危害[6]。因此,近年来臭氧成为食品工业广泛使用的食品消毒保鲜剂,特别是在水产品贮藏保鲜以及加工方面[7],臭氧保鲜与其他技术相结合的新型保鲜技术被不断投入使用。
众多研究表明臭氧冰相比于臭氧气体和臭氧水,不仅保持了原有的特性,还具有半衰期更长、保鲜效果更好、使用更方便等优势[8]。这是因为臭氧在低温环境中更为稳定[9],制成臭氧冰后可放入冰箱中贮藏一段时间,待使用时取出,无需现制现用;在保鲜过程中,随着臭氧冰的融化,臭氧被缓慢地释放出来,对寄生在水产品上的微生物起到了持续的抑制作用[10]。Blogoslawski等[11]研究表明,同时使用臭氧冰与普通冰分别处理皮氏枪乌贼 (Loligo pealei) 和红大麻哈鱼 (Oncorhynchus nerka) 样品一段时间,发现臭氧冰组的细菌总数比普通冰组平均减少了4 lg CFU·g−1,货架期比普通冰组延长了4 d左右,这说明臭氧冰对水产品的保鲜效果要优于普通冰。刁石强等[12-13]利用臭氧质量分数为5 mg·kg−1的臭氧冰对凡纳滨对虾 (Litopenaeus vannamei) 和罗非鱼 (Oreochromis spp.) 进行贮藏保鲜,与普通冰相比,臭氧冰组的保鲜期延长了4 d左右,明显提升了两者的感官品质。臭氧冰在果蔬与肉类保鲜储运中的应用研究[14]也较多。张明等[15]用臭氧质量分数为2.5 mg·kg−1的臭氧冰膜处理新鲜无花果 (Ficus carica),结果表明无花果的过氧化物酶、过氧化氢酶和超氧化物歧化酶活性得到显著提高,延缓了导致果蔬细胞脂质过氧化的过氧化氢和丙二醛的积累,从而延长了无花果的保质期。寇文丽等[16]用0.12% (w) 的R-多糖溶液浸泡大骨鸡鸡肉120 s后,再用臭氧质量分数为5 mg·kg−1的臭氧冰保鲜,测得菌落总数较空白处理组减少92.4%,货架期延长了2 d,达到保持鸡肉品质和抑菌的双重效果。上述研究利用臭氧冰保鲜取得了显著的效果,但是在臭氧冰的制备过程中,普遍存在臭氧保存率低的问题。刁石强等[17]用快速制冰机制备出臭氧冰,其臭氧保存率为14.48%。
如何利用臭氧水快速制备臭氧浓度高的臭氧冰,是臭氧冰保鲜水产品等食品的关键。本实验对快速制备高浓度的臭氧水和提高臭氧冰中臭氧浓度的影响因素进行了探索分析,确定了制备高浓度臭氧冰的最适参数条件,为高浓度臭氧冰的制备与贮藏提供了新思路,并可为水产品等食品的臭氧冰保鲜应用提供参考。
1. 材料与方法
1.1 材料与设备
主要试剂:碘化钾、硫酸、硫代硫酸钠标准滴定液 (0.1 mol·L−1)、乙酸 (分析纯)、磷酸 (分析纯)、柠檬酸 (分析纯)、氢氧化钠 (分析纯);可溶性淀粉。
设备仪器:F-SJ-2T臭氧水一体机 (广州飞歌环保科技有限公司);笔式pH计 (上海力辰邦西仪器科技有限公司);电热恒温水浴锅 (上海一恒科学仪器有限公司);低温冰箱 (杭州捷盛低温设备有限公司);温度计、天平、微量滴定管 (广州都宏生物科技有限公司)。
1.2 实验装置
臭氧水循环制备装置如图1所示。F-SJ-2T臭氧水一体机结合了变压吸附制氧装置、臭氧发生器和气液高效混合装置于一体,其工作原理是:通过变压吸附法过滤掉空气中的有害物质,并把氧气与其他气体分离,制备出高纯度、高浓度的氧气[18],然后把氧气通入臭氧发生器,制备出高浓度的臭氧气体。气液混合装置可以将水和高浓度的臭氧气体强力混合,使臭氧气体充分溶解在水中,产生质量分数不低于3 mg·kg−1的臭氧水。机器上的臭氧流量计可以控制进入气液高效混合装置的臭氧流量,从而控制臭氧水的产出浓度。制备好的臭氧水经过气液分离装置,能将未溶解的臭氧气体分离出来,避免其外溢影响环境。
为了能在短时间内制备出高浓度的臭氧水,本实验采用臭氧气体与臭氧水循环混合的方法,定制了一个两侧面分别有一个出水口和进水口的60 L食品级塑料水箱,并在水箱外部包裹保温材料,减少外部环境对水箱温度的影响。通过调节臭氧水循环过程中的臭氧气体流量、水温、pH等影响因素进行研究,探讨制备高浓度臭氧水的最适条件。
1.3 臭氧水和臭氧冰中臭氧浓度的测定方法
参考国家标准GBT 5750.11—2006《生活用水 消毒剂指标》、黄玉婷[19]和Rodrigues等[20]的碘量滴定法,并根据实验情况稍加修改,具体操作步骤如下:
臭氧水中臭氧质量浓度的测定:量取20% (w)的碘化钾溶液20 mL于500 mL的具塞锥形瓶中,然后从循环水箱中量取200 mL臭氧水于锥形瓶中,再加入5 mL硫酸溶液 (按照浓硫酸与蒸馏水的体积比为1∶5配制),瓶口加塞,摇匀后在暗处等待反应5 min。然后用0.1 mol·L−1的硫代硫酸钠标准滴定液滴定至溶液呈浅黄色时,加入10 g·L−1的淀粉指示剂1 mL继续滴定,直至瓶中溶液颜色变为透明后停止滴定,记录消耗硫代硫酸钠溶液的总体积。采用相同的方法,用超纯水取代臭氧水做空白试验,并通过下式计算出臭氧水中臭氧浓度。样品中臭氧的计算公式为:P1=C2×(V2−V3)×24 000/V1,式中:P1为臭氧质量浓度 (mg·L−1);C2为硫代硫酸钠标准溶液浓度 (mol·L−1);V1为臭氧水 (臭氧冰) 取样体积 (质量)[mL (g)];V2为臭氧水滴定时硫代硫酸钠标准溶液用量 (mL);V3为空白滴定时硫代硫酸钠标准溶液用量 (mL)。
臭氧冰中臭氧质量分数的测定:量取20% (w) 碘化钾溶液20 mL于500 mL的具塞广口瓶中,加入200 g制备好的臭氧冰,加塞并于60 ℃水浴融化,融化过程中需不时取出摇匀,当瓶中臭氧冰基本融化后取出,加入5 mL硫酸溶液,摇匀后在暗处反应5 min。用0.01 mol·L−1的硫代硫酸钠标准溶液滴定,方法同上。
1.4 高浓度臭氧水的制备
1.4.1 水温对臭氧水中臭氧质量浓度的影响
在制备臭氧水之前,调节臭氧水一体机的臭氧气体流量为3 L·min−1,往循环水箱中加入40 L温度分别为5、15和25 ℃的水,水温变化范围为±1 ℃,进行60 min的臭氧水循环。在不同温度循环过程中,每隔5 min从水箱中取样测定水中臭氧的浓度,探究在臭氧水循环过程中臭氧浓度达到饱和的时间,并比较在不同水温下臭氧水的饱和浓度。
1.4.2 pH对臭氧水中臭氧质量浓度的影响
每次实验往循环水箱中加入40 L不同pH的水,气体流量固定为3 L·min−1,水温控制在5 ℃左右,用乙酸缓冲溶液和氢氧化钠溶液调节每次加入水箱中水的pH分别为3、5、7和9。在不同pH循环过程中,每隔5 min从水箱中取样测定水中臭氧的浓度,探究臭氧水中臭氧浓度的变化。
1.4.3 臭氧气体流量对臭氧水中臭氧质量浓度的影响
为探究与水混合的臭氧气体流量对臭氧水中臭氧浓度的影响,在每次实验开始前,调节臭氧水一体机的臭氧流量计,使通入气液高效混合装置的臭氧气体流量分别为1、2、3、4和5 L·min−1,再往循环水箱中加入40 L水,用乙酸缓冲溶液调节水的pH为3,水温控制在5 ℃,进行臭氧水循环制备实验。每隔5 min取样测定水中臭氧的浓度,探究在臭氧水循环过程中臭氧浓度的变化。
1.5 臭氧冰的制备与贮藏
1.5.1 冻结温度对臭氧冰中臭氧质量分数的影响
把温度和浓度相同的臭氧水用相同规格的制冰模具密封后,分别放入超低温冰箱 (−80、−40和−18 ℃) 和液氮中,在不同的低温条件下冻结制备成臭氧冰。每隔一段时间观察在不同条件下臭氧水的结冰情况,记录臭氧水完全冻结成臭氧冰时所需时间。臭氧水完全冻结成冰后取出,测定其臭氧浓度,比较在不同冻结温度下臭氧冰中臭氧的保存率。臭氧冰中臭氧保存率按照下列公式计算[21]:臭氧保存率=水的密度 (kg·L−1)×臭氧冰质量分数 (mg·kg−1)/臭氧水质量浓度 (mg·L−1)×100%。
1.5.2 不同条件的臭氧水质量浓度对臭氧冰的影响
臭氧水在冻结成冰的过程中,存在部分臭氧发生分解的情况。方敏等[22]的研究表明,臭氧水的温度和pH是影响臭氧分解速率的重要因素。采用不同温度、pH和浓度的臭氧水冻结制备成臭氧冰,比较不同臭氧水条件冻结成的臭氧冰中臭氧的保存率。
1.5.3 不同贮藏温度下冰中臭氧质量分数的衰减变化
将制备好的臭氧冰分别放入0、−18和−40 ℃的冰箱中密封贮藏,每隔一段时间取样检测臭氧冰中臭氧的质量分数,观察在不同贮藏温度下冰中臭氧保存率随时间的变化情况。
1.6 数据处理
实验重复3次,采用Excel 2016软件进行数据分析,通过SPSS 23.0软件进行单因素方差分析和差异显著性 (P<0.05) 分析,利用Origin 2019b软件进行绘图。实验数据以“平均值±标准差 (
$\overline { x}\pm { {s}} $ )”表示。2. 结果与分析
2.1 高浓度臭氧水的制备及其影响因素
2.1.1 水温对臭氧水中臭氧质量浓度的影响
臭氧水在循环制备过程中,不同水温的臭氧水中臭氧质量浓度随时间的变化如图2所示。水温对臭氧在水中的溶解量有较大影响,水温降低,臭氧分子活跃性减弱,导致臭氧在水中的溶解量增加,故臭氧浓度达到饱和时所需时间缩短[23]。由图2可知,在同一循环制备时间,水温越低,臭氧水中臭氧质量浓度越高;循环制备臭氧水时间约30 min时,3种水温的臭氧水中臭氧浓度达到饱和,5、15和25 ℃的臭氧水的饱和质量浓度分别为45.23、27.58和13.76 mg·L−1,5 ℃水温中的臭氧水的饱和臭氧浓度为25 ℃水温中的3.2倍。低温对臭氧在水中的溶解并维持水中臭氧稳定性有较好的效果。
![]() 图 2 不同水温对臭氧水中臭氧质量浓度的影响Figure 2. Effects of different water temperatures on ozone mass concentration in ozone water
图 2 不同水温对臭氧水中臭氧质量浓度的影响Figure 2. Effects of different water temperatures on ozone mass concentration in ozone water2.1.2 pH对臭氧水中臭氧浓度的影响
臭氧水在循环制备过程中,不同pH的臭氧水中臭氧质量浓度随时间的变化如图3所示。在同一循环制备时间,水箱中水的pH越低,臭氧水中臭氧的浓度越高,当循环水制备时间达到20 min以上,各组臭氧水中的臭氧浓度陆续达到饱和值。当水的pH为3时,所制得的臭氧水达到饱和的时间最短,此时臭氧水的饱和浓度最高 (50.27 mg·L−1)。Zhou等[24]、Staehelin和Hoigne [25]的研究结果均证明,碱性溶液所存在的大量氢氧根 (OH−) 会加速催化臭氧的分解,而酸性溶液中的氢离子 (H−) 会与OH−反应,降低溶液中OH−的量,从而减缓水中臭氧的分解反应,提高臭氧水的稳定性。因此,降低臭氧水的pH,能提高臭氧在水中的溶解度。
![]() 图 3 不同 pH 对臭氧水中臭氧质量浓度的影响Figure 3. Effects of different pH values on ozone mass concentration in ozone water
图 3 不同 pH 对臭氧水中臭氧质量浓度的影响Figure 3. Effects of different pH values on ozone mass concentration in ozone water2.1.3 臭氧气体流量对臭氧水中臭氧浓度的影响
臭氧水在循环制备过程中,调节与水混合的臭氧气体流量大小,臭氧水中臭氧浓度随时间的变化如图4所示。当臭氧气体流量从1 L·min−1增加到3 L·min−1,水中臭氧质量浓度的增速加快、臭氧达到饱和时的浓度上升;臭氧气体流量为3 L·min−1时,臭氧饱和浓度最大 (50.27 mg·L−1)。当气体流量继续增加至高于3 L·min−1时,臭氧水的饱和浓度反而减小。导致此现象的原因可能是,臭氧气体流量较慢时,臭氧与水能够充分混合,此时水中臭氧浓度与气体流量呈正相关;达到阈值后,过大的流量会加强水中臭氧分子的活跃性,促进臭氧的分解,从而使水中臭氧浓度降低[17]。为使臭氧水保持较高浓度,在后续实验中将臭氧水一体机的臭氧流量固定为3 L·min−1。
![]() 图 4 不同臭氧气体流量对臭氧水中臭氧质量浓度的影响Figure 4. Effects of different flow rates of ozone gas on ozone mass concentration in ozone water
图 4 不同臭氧气体流量对臭氧水中臭氧质量浓度的影响Figure 4. Effects of different flow rates of ozone gas on ozone mass concentration in ozone water2.2 臭氧冰的制备与贮藏
2.2.1 冻结温度对臭氧冰中臭氧质量分数的影响
将温度、pH和质量浓度相同 (35.47 mg·L−1) 的臭氧水采用液氮 (−196 ℃) 和不同温度的低温冰箱进行冻结制备臭氧冰,结果见表1。可以看出,臭氧冰在不同的冻结温度下的臭氧质量分数差别较大,随着冻结温度的降低,冰中的臭氧保存率越来越高。使用液氮冻结臭氧冰,结冰过程时间最短,臭氧冰中臭氧质量分数为11.95 mg·kg−1,臭氧保存率达33.69%,远高于其他冻结条件,减少了臭氧的损失。孙瑜等[26]对高浓度臭氧冰的制备方法进行对比,发现使用液氮喷淋的方式制备臭氧冰,臭氧的损耗率远低于干冰浸没与冰箱冷冻等臭氧冰制备方式。本实验所得结果与该实验相近。在臭氧水冻结成冰的过程中,冰膜的形成会阻挡臭氧的逸散[27],而冻结温度是冰膜形成时间的主要影响因素,因此臭氧保存率会受冻结温度的影响。在后续实验中,为提高冰中臭氧浓度,采用液氮速冻的方式制取臭氧冰。
表 1 在臭氧水 5 ℃、pH 7、质量浓度 35.47 mg·L−1 条件下冻结温度对冰中臭氧保存率的影响Table 1. Effect of freezing temperature on ozone retention rate in ice at water temperature of 5 ℃, pH of 7 and ozone water mass concentration of 35.47 mg·L−1冻结温度
Freezing temperature/℃冻结时间
Freezing time/min臭氧冰质量分数
Ozone ice mass fraction/(mg·kg−1)臭氧保存率
Ozone preservation rate/%−196 (液氮 Liquid nitrogen) 3 11.95±0.08 33.69 −80 90 3.61±0.06 10.18 −40 135 1.85±0.15 5.21 −18 220 1.20±0.06 3.39 2.2.2 不同条件的臭氧水对臭氧冰质量分数的影响
1) 臭氧水质量浓度的影响。用水温为5 ℃、pH为7左右的超纯水制备成浓度从高到低的臭氧水,迅速放入液氮中冻结成冰,臭氧水质量浓度与臭氧冰质量分数的关系如图5所示。可以看出,当臭氧水质量浓度不断上升时,制得的臭氧冰质量分数也随之增加。因此,要提高臭氧冰中的臭氧保存率,应采用高浓度的臭氧水。
![]() 图 5 臭氧水质量浓度对臭氧冰质量分数的影响注:字母不同表示差异显著(P<0.05)。后图同此。Figure 5. Effect of ozone water mass concentration on ozone ice mass fractionNote: Different letters represent significant differences (P<0.05).The same case in the following figures.
图 5 臭氧水质量浓度对臭氧冰质量分数的影响注:字母不同表示差异显著(P<0.05)。后图同此。Figure 5. Effect of ozone water mass concentration on ozone ice mass fractionNote: Different letters represent significant differences (P<0.05).The same case in the following figures.2) 臭氧水pH的影响。用水温为5 ℃、不同pH的水制备成臭氧质量浓度接近13 mg·L−1的臭氧水,然后分别放入液氮中冻结成冰,检测冰中臭氧质量分数,探究不同pH的臭氧水对臭氧冰中臭氧保存率的影响。从表2可知,当臭氧水pH为5时,臭氧冰中臭氧保存率可达最大值;而当臭氧水pH继续降低到3时,冰中臭氧保存率反而降低,出现此现象的原因可能是溶液中乙酸浓度过高,臭氧水结成冰后使臭氧的饱和浓度降低[28]。从表2可推断出,弱酸性条件有利于减缓臭氧水从液态转变成固态时臭氧的分解,提高臭氧冰中臭氧的稳定性。
表 2 在臭氧水温度 5 ℃ 条件下臭氧水 pH 对冰中臭氧保存率的影响Table 2. Effect of pH of ozone water on ozone retention rate in ice at water temperature of 5 ℃臭氧水pH
Ozone water pH臭氧水质量浓度
Ozone water mass concentration/(mg·L−1)臭氧冰质量分数
Ozone ice mass fraction/(mg·kg−1)臭氧保存率
Ozone preservation rate/%3 13.23 2.55±0.15 19.26 5 12.48 3.35±0.18 26.88 7 13.51 1.83±0.08 13.53 9 12.72 1.24±0.12 9.75 3) 臭氧水温度的影响。用pH为5、不同温度的水制备成臭氧质量浓度接近20 mg·L−1的臭氧水,然后分别放入液氮中制备成臭氧冰,检测冰中臭氧质量分数,探究不同温度的臭氧水对臭氧冰中臭氧保存率的影响。从表3可知,臭氧水的温度越高,臭氧冰中臭氧的浓度越低,5 ℃的臭氧水制成的臭氧冰相比于25 ℃而言,冰中臭氧保存率提高了20.35%。从分子动力学角度分析[29],臭氧水温度越高,水中的臭氧分子运动越剧烈,而且冻结形成冰膜的时间也越长,因此在结冰过程逸散的臭氧分子增多。
表 3 臭氧水 pH 为 5 条件下臭氧水温度对冰中臭氧保存率的影响Table 3. Effect of ozone water temperature on ozone retention rate in ice at ozone water pH of 5臭氧水温度
Ozone water temperature/
℃臭氧水质量浓度
Ozone water mass concentration/
(mg·L−1)臭氧冰质量分数
Ozone ice mass fraction/
(mg·kg−1)臭氧保存率
Ozone preservation
rate/%25 20.62 2.93±0.05 14.27 15 20.83 4.79±0.13 22.98 5 21.28 7.38±0.04 34.66 2.2.3 贮藏过程中臭氧冰质量分数衰减变化
1) 不同温度的影响。为探究不同贮藏温度下臭氧冰中臭氧质量分数随贮藏时间的衰减变化情况,将同一质量浓度的臭氧水迅速放入液氮中速冻制成臭氧冰,然后密封分别放入温度为0、−18和−40 ℃的冰箱中贮藏,温度波动范围为 ±1 ℃。臭氧冰在0 ℃贮藏环境下,每天取样检测臭氧冰中臭氧的质量分数;在−18和−40 ℃下,每隔1 d取样检测臭氧冰中臭氧的质量分数,结果见图6。在贮藏期间,3组样品中的臭氧质量分数均随着贮藏时间的延长而下降,贮藏温度越高,下降速率越快。在0 ℃环境中贮藏至第7天时,臭氧冰基本融化,在融化的水中检测的臭氧质量浓度约为0 mg·L−1。贮藏至第16天时,−18 ℃下贮藏的样品中臭氧质量分数下降到约2 mg·kg−1,为初始质量分数的24.78%,此后随贮藏时间的延长基本保持稳定;−40 ℃条件下贮藏的臭氧冰中臭氧的质量分数下降到4.50 mg·kg−1后基本保持稳定,此时臭氧冰中臭氧保存率为初始臭氧冰的55.76%。
![]() 图 6 不同贮藏温度下臭氧冰质量分数随时间的变化Figure 6. Variation of ozone ice concentration with time at different storage temperatures
图 6 不同贮藏温度下臭氧冰质量分数随时间的变化Figure 6. Variation of ozone ice concentration with time at different storage temperatures2) 不同pH的影响。为探究在贮藏过程中不同pH的臭氧冰浓度的衰减随时间的变化情况,将pH分别为3、5、7和9的臭氧水制成臭氧冰,然后分别密封放入环境温度为 (0±1) ℃的冰箱中贮藏,每天对4组臭氧冰进行取样,检测冰中臭氧的质量分数。从图7中可看出,利用pH不同、质量浓度接近的臭氧水分别制成臭氧冰后,其初始臭氧保存率差别较大,其中pH为5时臭氧冰中臭氧保存率最大。在贮藏过程中,4组冰的臭氧保存率在初始前2 d均发生急速衰减,而pH为5时冰中臭氧保存率始终高于其他3组;说明此时臭氧冰在融化过程中能较好地维持冰中臭氧的稳定性。后续实验采用pH为5的臭氧水来制备臭氧冰。
![]() 图 7 不同 pH 条件下冰中臭氧保存率随时间的变化Figure 7. Variation of ozone retention rate in ice with time at different pH values
图 7 不同 pH 条件下冰中臭氧保存率随时间的变化Figure 7. Variation of ozone retention rate in ice with time at different pH values3) 酸度调节剂的影响。分别采用乙酸、磷酸、柠檬酸作为酸度调节剂,调节水的pH为5,然后制备出初始质量浓度约为30 mg·L−1的臭氧水。将3组臭氧水分别用液氮冻结成臭氧冰,放入温度为 (0±1) ℃的冰箱中密封贮藏,用超纯水制备臭氧冰作为对照,每天检测这4组臭氧冰中臭氧的质量分数,分析哪种酸度调节剂能进一步提高臭氧冰中臭氧的稳定性。由图8可看出,臭氧水制成冰后,用乙酸调节pH制备的臭氧冰中臭氧质量分数最高,其初始臭氧质量分数可达18.60 mg·kg−1,臭氧保存率可达58.13%,优于董凯兵[27]的研究结果。在贮藏期间,3个处理组的臭氧冰中臭氧质量分数均高于空白对照组,而乙酸组臭氧冰的臭氧质量分数显著高于另外两个处理组,该结果与方敏等[22]、肖玥惠子[28]对缓释型臭氧冰的研究结果一致,说明乙酸对维持冰中臭氧稳定性的效果优于其他两种酸度调节剂。
3. 结论
循环水箱中的水温、pH和臭氧气体流量均会影响臭氧水中的臭氧浓度,循环水箱中水的温度和pH越低,所制得的臭氧水中的臭氧浓度越高。臭氧水在循环制备过程中的臭氧气体流量过大或过小对制备的臭氧水中的臭氧浓度均有较大影响,最适的臭氧气体流量为3 L·min−1。调节循环水箱中水的温度为5 ℃、pH为3、臭氧气体流量为3 L·min−1时,可以在20 min左右制备出质量浓度高达50.27 mg·L−1的臭氧水,该浓度可以在水箱循环过程中维持较长时间。
影响臭氧冰中臭氧浓度的因素主要有冻结温度、臭氧水中的臭氧浓度、臭氧水pH、臭氧水温、酸度调节剂等。冻结温度越低,臭氧冰中臭氧的保存率越高。采用液氮冻结臭氧水制备臭氧冰,制作时间短,臭氧冰中臭氧浓度最高。臭氧水浓度越高,所制得的臭氧冰中的臭氧浓度也越高,但与制备臭氧水不同,并不是臭氧水pH越低,所制得的臭氧冰中的臭氧浓度越高,当臭氧水pH为5时,所制得的臭氧冰中臭氧浓度最高。臭氧冰贮藏温度越低,其臭氧衰减越慢。与磷酸、柠檬酸相比,乙酸作为酸度调节剂对提高臭氧冰臭氧的保存率具有显著效果,乙酸作为酸度调节剂对臭氧冰中的臭氧保存率可达58.13%,磷酸和柠檬酸却分别只有48.75%和47.28%。
-
![]()
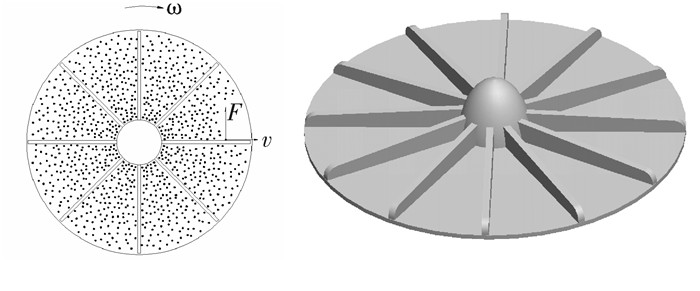
图 1 计量装置工作原理ω.转动角速度;v.径向速度;F.力矩
Figure 1. Working principle of metering device ω.angular speed of rotating wheel; v.radial speed of granule; F.force moment
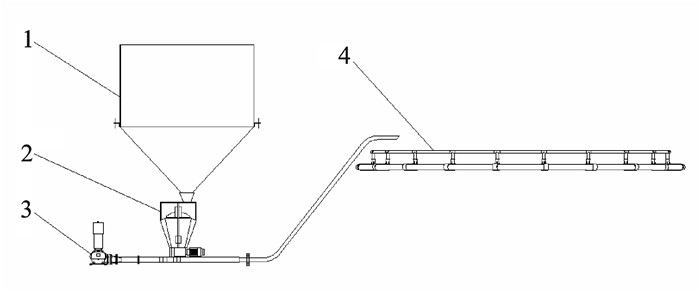
![]()
图 2 自动投饵系统结构框架
1. 料仓;2. 计量装置;3. 罗茨风机;4. 深水网箱
Figure 2. Framework of auto feeding system
1. silo; 2. metering device; 3. Root′s blower; 4. deep-sea cage
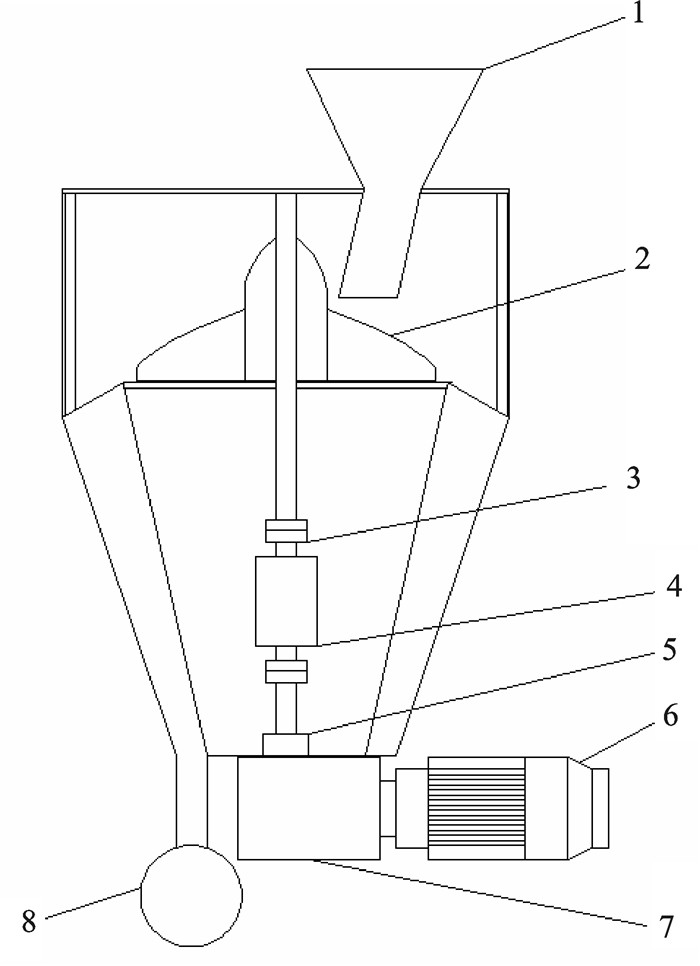
![]()
图 3 计量装置结构图
1. 进料器;2. 旋转轮;3. 联轴器;4. 扭矩传感器;5. 增量式编码器;6. 电机;7. 减速器;8. 出料口
Figure 3. Structure of metering device
1. feed inlet; 2. rotating wheel; 3. coupling; 4. torque sensor; 5. incremental encoder; 6. motor; 7. reducer; 8. feed outlet
-
[1] 郭根喜, 陶启友. 深水网箱养殖装备技术前沿进展[J]. 中国农业科技导报, 2011, 13(5): 44-49. doi: 10.3969/j.issn.1008-0864.2011.05.07 [2] 郭根喜, 黄小华, 胡昱, 等. 深水网箱理论研究与实践[M]. 北京: 海洋出版社, 2013: 114-120. https://xueshu.baidu.com/usercenter/paper/show?paperid=83960d1171b7c353843ccc79889a58a4&site=xueshu_se&hitarticle=1 [3] 庄保陆, 郭根喜. 水产养殖自动投饵装备研究进展及其应用[J]. 南方水产, 2008, 4(4): 67-72. doi: 10.3969/j.issn.2095-0780.2008.04.013 [4] 胡昱, 郭根喜, 汤涛林, 等. 基于MCGS的深水网箱自动投饵远程控制系统的设计[J]. 渔业科学进展, 2010, 31(6): 118-123. doi: 10.3969/j.issn.1000-7075.2010.06.016 [5] 胡昱, 郭根喜, 黄小华, 等. 基于PLC的深水网箱自动投饵系统[J]. 南方水产科学, 2011, 7(4): 61-68. doi: 10.3969/j.issn.2095-0780.2011.04.0010 [6] TURMELLE C A, SWIFT M R, CELIKKOL B, et al. Design of a 20-ton capacity finfish aquaculture feeding buoy: Oceans′06 MTS/IEEE, Boston, September 18-21, 2006[C]. Boston, USA: Oceans, 2006: 1-6. https://ieeexplore.ieee.org/document/4098932
[7] TSUNODA T, KITAZAWA D, KINOSHITA T, et al. Concept of an offshore aquaculture system with an automated feeding platform: Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Estoril, June 15-20, 2008[C]. Estoril: Portugal, OMAE, 2008. doi: 10.1115/OMAE2008-57719
[8] 庄保陆. 远程气力输送自动投饵技术与装备的研究[D]. 上海: 上海海洋大学, 2008: 5-10. https://xueshu.baidu.com/usercenter/paper/show?paperid=9f327fefbc75670378376ca297237721 [9] 葛一健. 我国投饲机产品的发展与现状分析[J]. 渔业现代化, 2010, 38(4): 63-65. doi: 10.3969/j.issn.1007-9580.2010.04.013 [10] 杨小昆, 刘小球, 马健, 等. 科里奥利原理在测量散粒料流量中的应用[J]. 中国粉体技术, 2004(5): 43-47. doi: 10.3969/j.issn.1008-5548.2004.05.013 [11] 彭践. 散状固体的流量测量[J]. 自动化与仪表, 2003(2): 10-11. doi: 10.3969/j.issn.1001-9944.2003.02.004 [12] 耿春明, 满庆丰, 夏继强, 等. 科里奥利固体散料质量流量测量原理分析[J]. 计量技术, 2005(6): 33-34. doi: 10.3969/j.issn.1000-0771.2005.06.011 [13] 章世秀, 丁永前. 固体颗粒料质量流量测量技术现状分析及设想[J]. 中国农机化, 2004(5): 52-53. doi: 10.3969/j.issn.1006-7205.2004.05.018 [14] 丁永前, 丁为民. 新型固体颗粒料质量流量检测方法的设计与理论分析[J]. 电子测量与仪器学报, 2007, 21(6): 45-48. [15] 谢新锋. 异步电动机直接转矩控制闭环调速系统的研究[D]. 南宁: 广西大学, 2003. [16] 段凤秋, 张徐文. 基于DSP处理的科里奥利力质量流量计设计[J]. 石油机械, 2005, 33(3): 28-30. doi: 10.3969/j.issn.1001-4578.2005.03.009 [17] 高伟, 金勇. 一种基于TMS320F2812的电机转速测量方法[J]. 机床与液压, 2011, 39(6): 94-95. [18] 顾卫钢. 手把手教你学DSP[M]. 北京: 北京航空航天大学出版社, 2011: 2-6. https://xueshu.baidu.com/usercenter/paper/show?paperid=aa738ec73c05f855fdb2b4fe92056a04&site=xueshu_se [19] 耿春明, 刘亚, 满庆丰. 基于ARM与DSP的科里奥利粉料流量测控系统[J]. 仪表技术与传感器, 2012(12): 52-55. doi: 10.3969/j.issn.1002-1841.2012.05.018 [20] 王建民. 我国水泥工业物料计量技术、装备现状及展望[J]. 中国计量, 2011(2): 84-87. doi: 10.3969/j.issn.1006-9364.2011.02.031 [21] 王荣东. 科氏力秤煤粉计量系统在水泥生产线的应用[J]. 水泥, 2009(11): 55-58. doi: 10.3969/j.issn.1002-9877.2009.12.024 [22] 王琳灵, 潘邵来, 吕子剑. 科里奥利力秤在熟料窑自动喂煤系统中的应用[J]. 轻金属, 2004(6): 58-64. doi: 10.3969/j.issn.1002-1752.2004.06.016 [23] 张晓宁, 付永领. 粉体质量流量计综述[J]. 测控技术, 2006, 25(12): 1-4. doi: 10.3969/j.issn.1000-8829.2006.12.001 [24] 王庆华. 粉状物料连续定量给料设备及控制系统的研究[D]. 武汉: 武汉理工大学, 2004. 10.7666/d.y611888

 下载:
下载:








计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
 粤公网安备 44010502001741号
粤公网安备 44010502001741号
